Twenty Three Hundred
Interrupts and Asynchronism
Dr Charles Martin
Semester 1, 2022

Interrupts
- Interrupts: what, when and why?
- What happens during an interrupt?
- How does it work on your microbit?
- How is this related to parallel computing?
Admin Time
You’ve now completed 45% of the assessment for COMP2300/6300!
midsem results, eta end of week 9.
assignment 2 coming out this week — a new challenge for you!
week 9 is an assignment pre-submission week!
don’t forget to go to your labs!!
Assignment 2: Digital Pet!
This is going to be fun!
What is an interrupt?
- Do you check you messages only at certain times of day?
- If your phone rings, do you answer it?
On your microbit…
- CPU is running its sequence of machine instructions
- How is it going to handle communications with all the other devices on the board?
Imagine your microbit is a starship...
Every starship has a captain
(This is assumed knowledge)
polling vs interrupts
Idea 1: Polling!
- Check each external device at a certain time.
- We will need to do this regularly.
main: @ do some work!
bl check_keyboard
bl check_mouse
bl check_camera
bl do_some_actual_work @ yeah!
bl check_usb_1
bl check_temperature
bl do_some_other_work @ woo!
bl check_usb_2
bl check_network
b main
Idea 2: Interrupts
Change our processor architecture to allow an external part to “interrupt” our fetch-decode-execute cycle!
Sequence of code is interrupted, and the CPU automatically branches to an “interrupt handler”.
main: @ do some work!
bl do_some_actual_work @ yeah!
bl do_some_other_work @ woo!
b main
keyboard_interrupt_handler:
@ do what's needed to check the keyboard
bx lr
But how does this work in practice? (we’ll find out in a minute…)
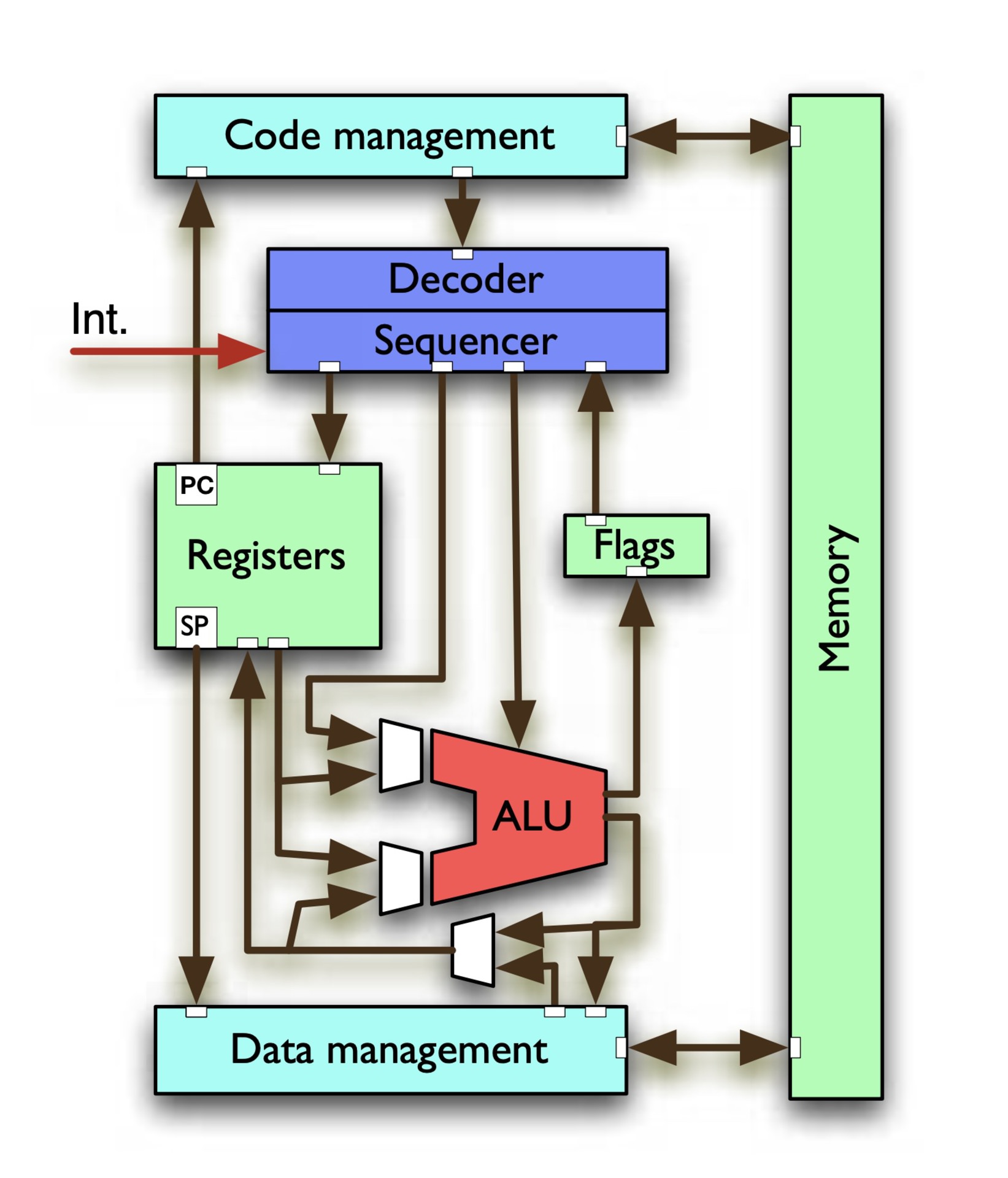
Interrupts: CPU Perspective
Polling vs Interrupts
Polling: Simple to implement, easy to calculate latency, fastest for small number of devices (e.g., one)
BUT: Devices need to wait their turn, events/data could be missed, main can get unmanageably long!
Interrupts: Enables pre-emptive scheduling, timer driven actions, transient hardware interactions, etc…
BUT: A little bit more work to set up, requires external hardware (“interrupt controller”) to encode external requests.
Why is this important?
So far, your microbit has been running like clockwork (fetch-decode-execute, fetch-decode-execute, etc).
Now, an interrupt could happen at any time.
talk
“An interrupt could happen at any time.”
What does this mean for your assumptions as a programmer?
Interrupts - Expecting the Unexpected
Our computers need to respond to external events, as well as errors!
Interrupts happen all the time (keyboard?)
Breaks our assumptions about fetch-decode-execute cycle, need to follow a process to save our context, and get back to it later.
How does an interrupt work?
How is this going to work?
- How should we store the interrupt code?
- How does the microbit know how to get there?
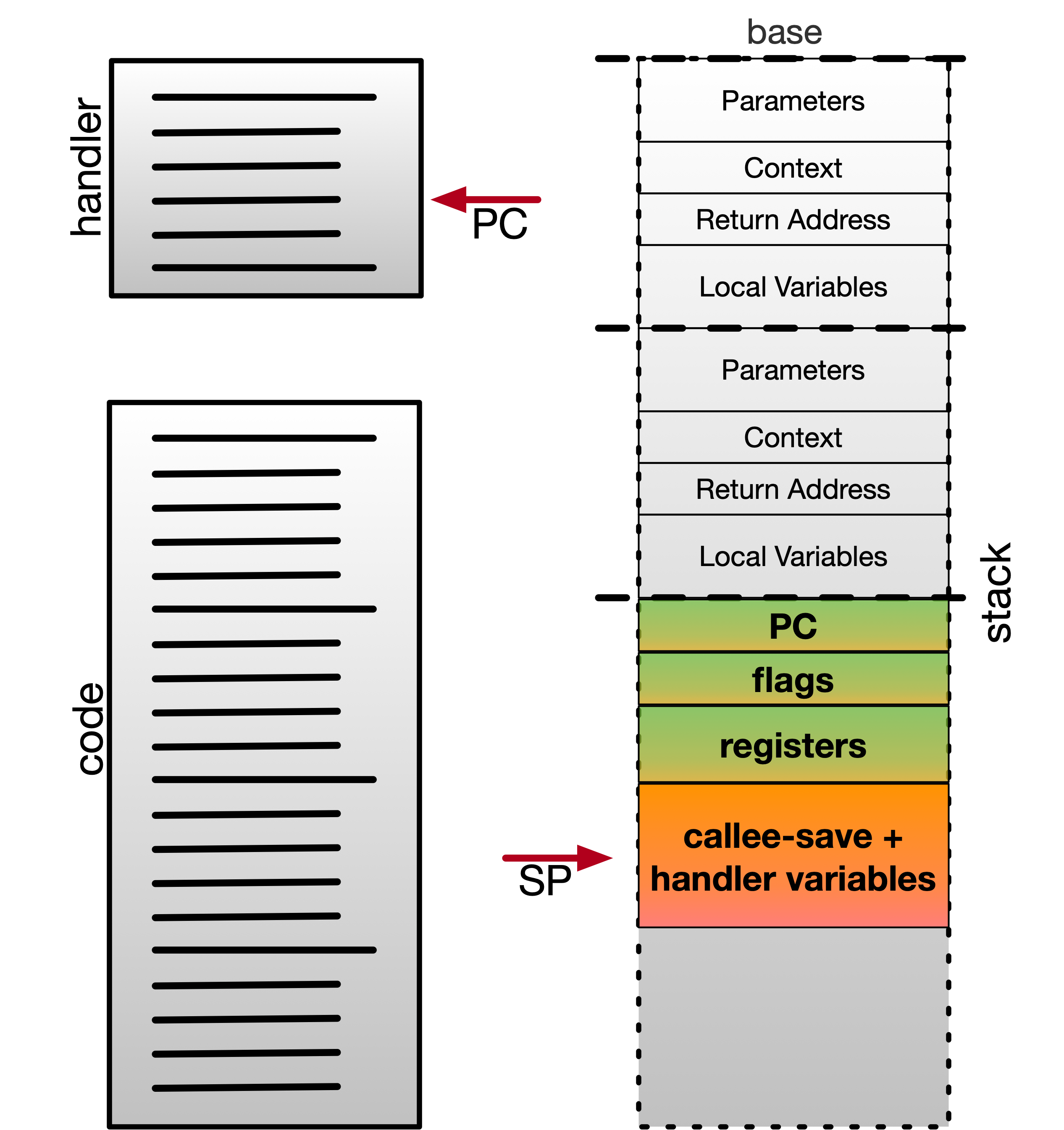
Pre-Interrupt
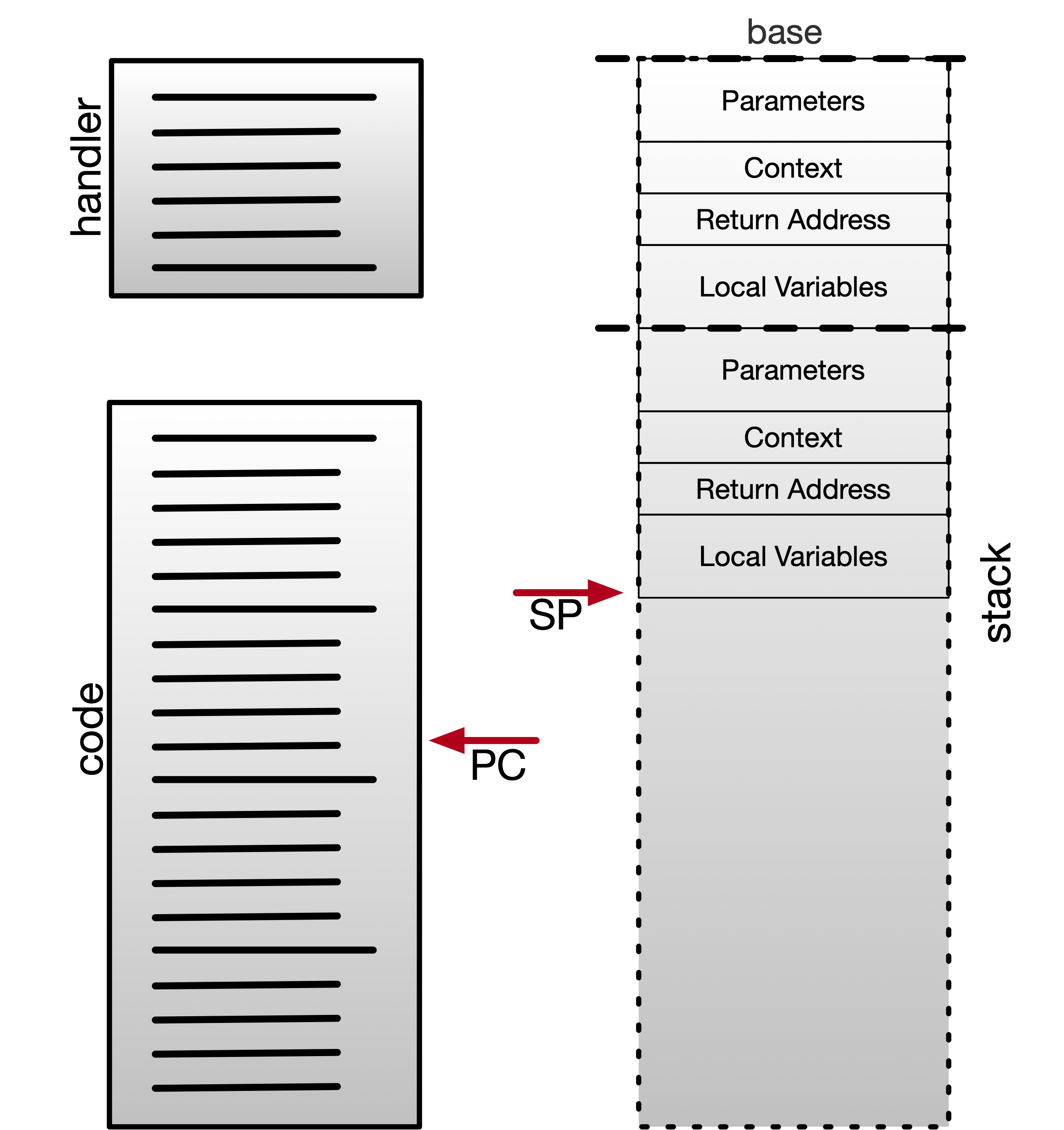
Everything is fine!
fetch-decode-execute ticking away!
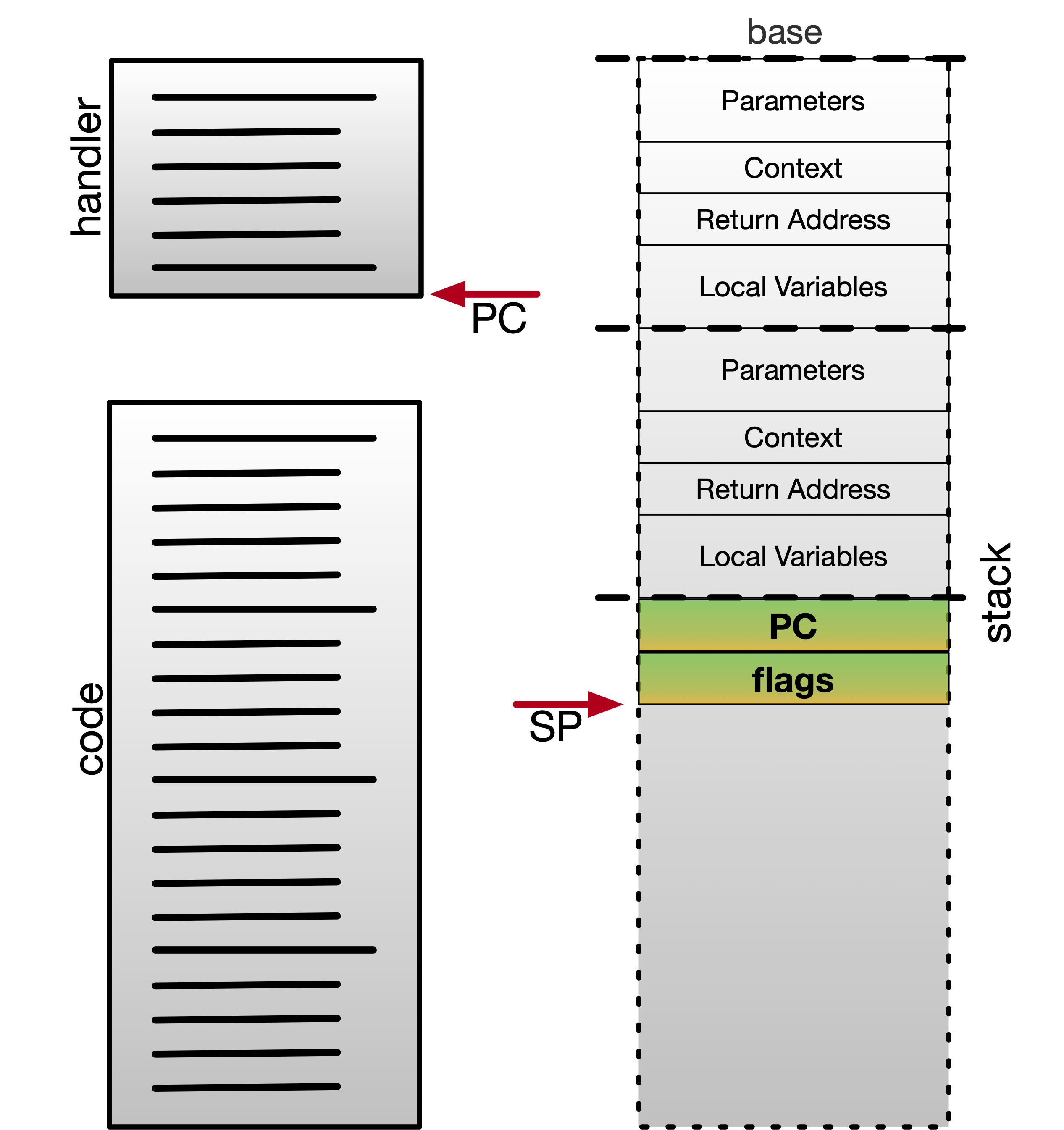
Interrupt occurs!!
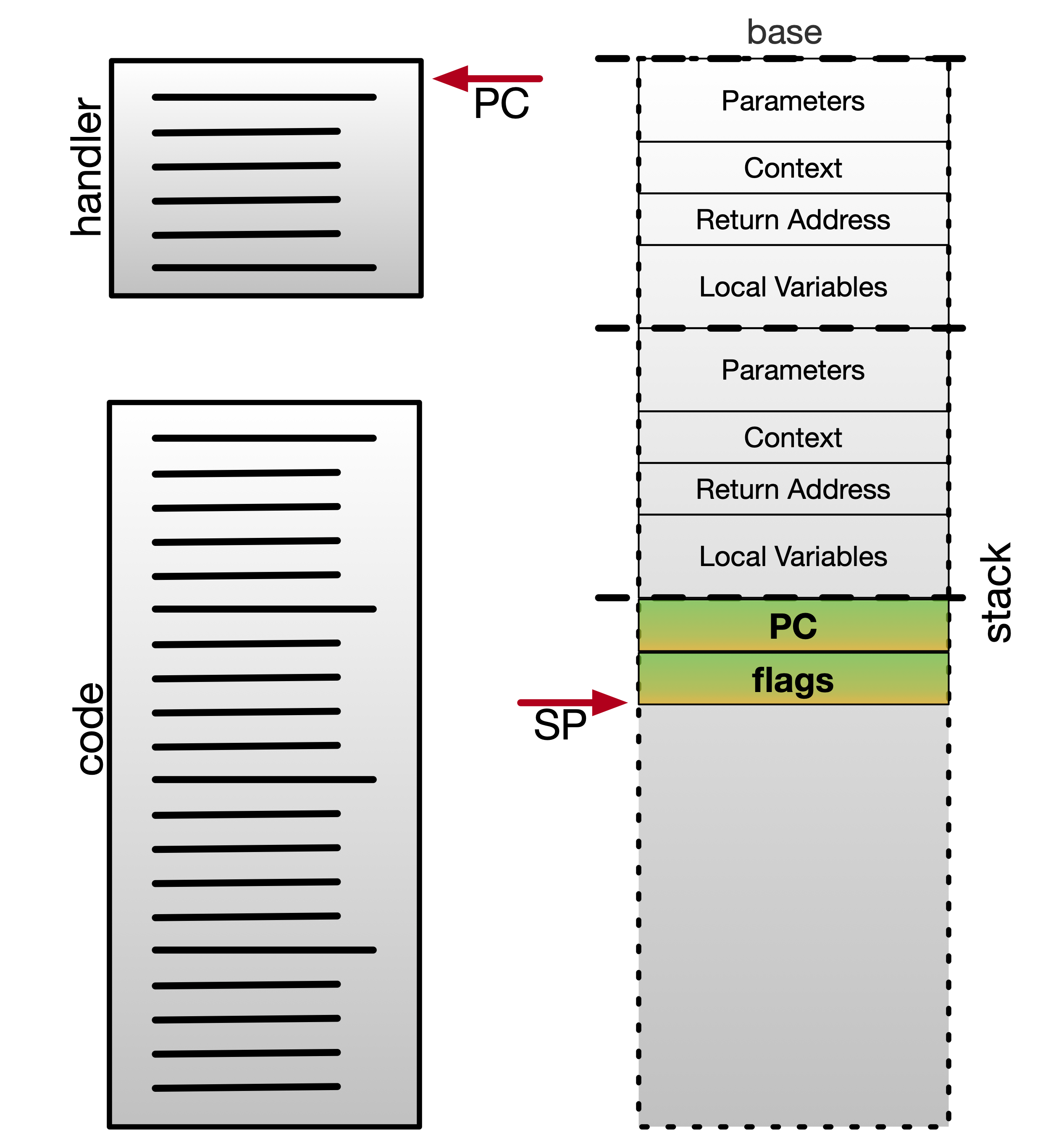
Save PC and flags on the stack (the CPU hardware does this for you!!)
Now the PC is inside an interrupt handler (a function that has been set up previously to look after this interrupt)
The link register lr has been set up with a special value!
Run the handler code
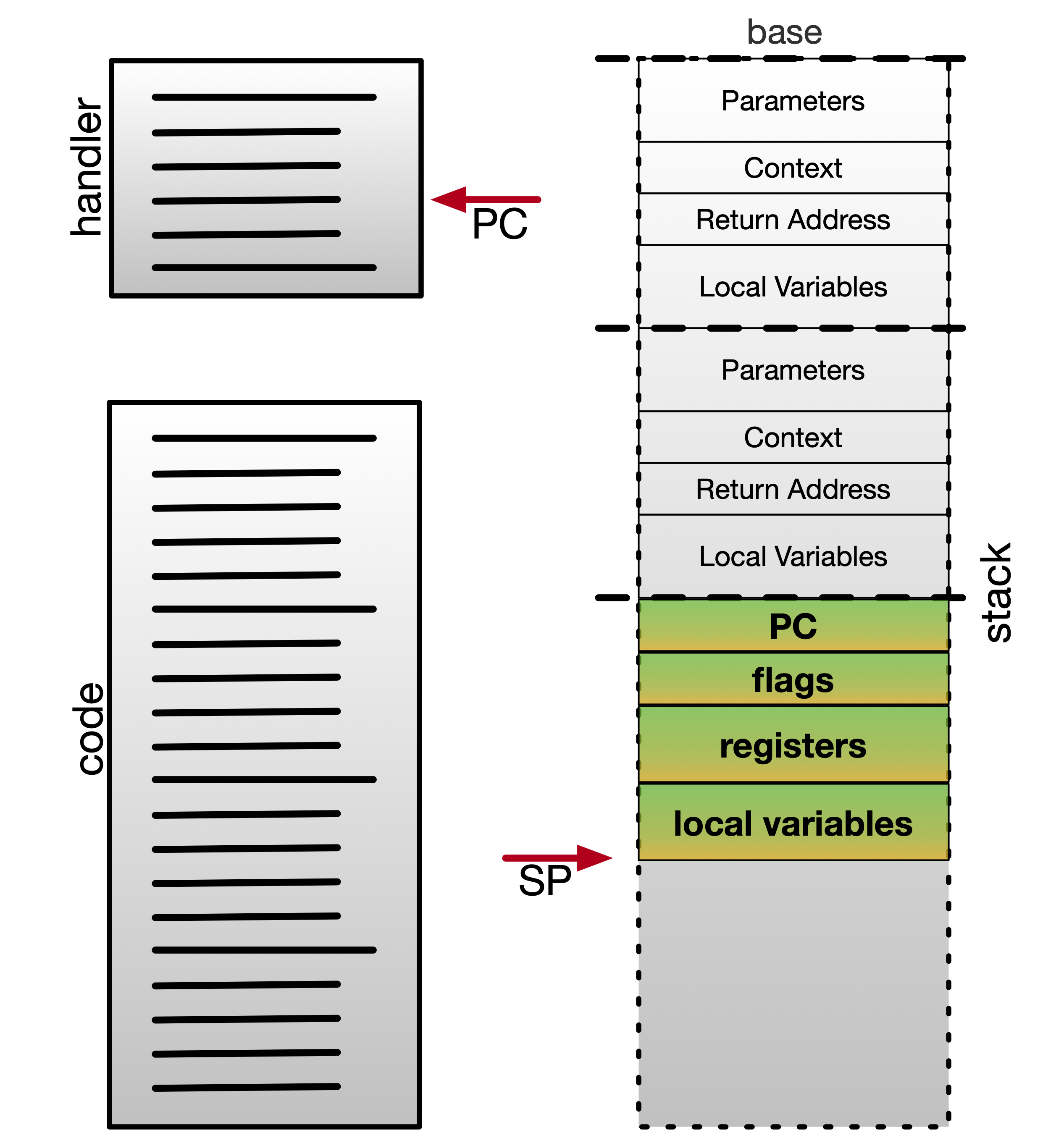
push registers
declare local variables
..do some I/O..
..run some time critical code..
Clean up after the handler
remove local variables
pop registers
Return from Interrupt
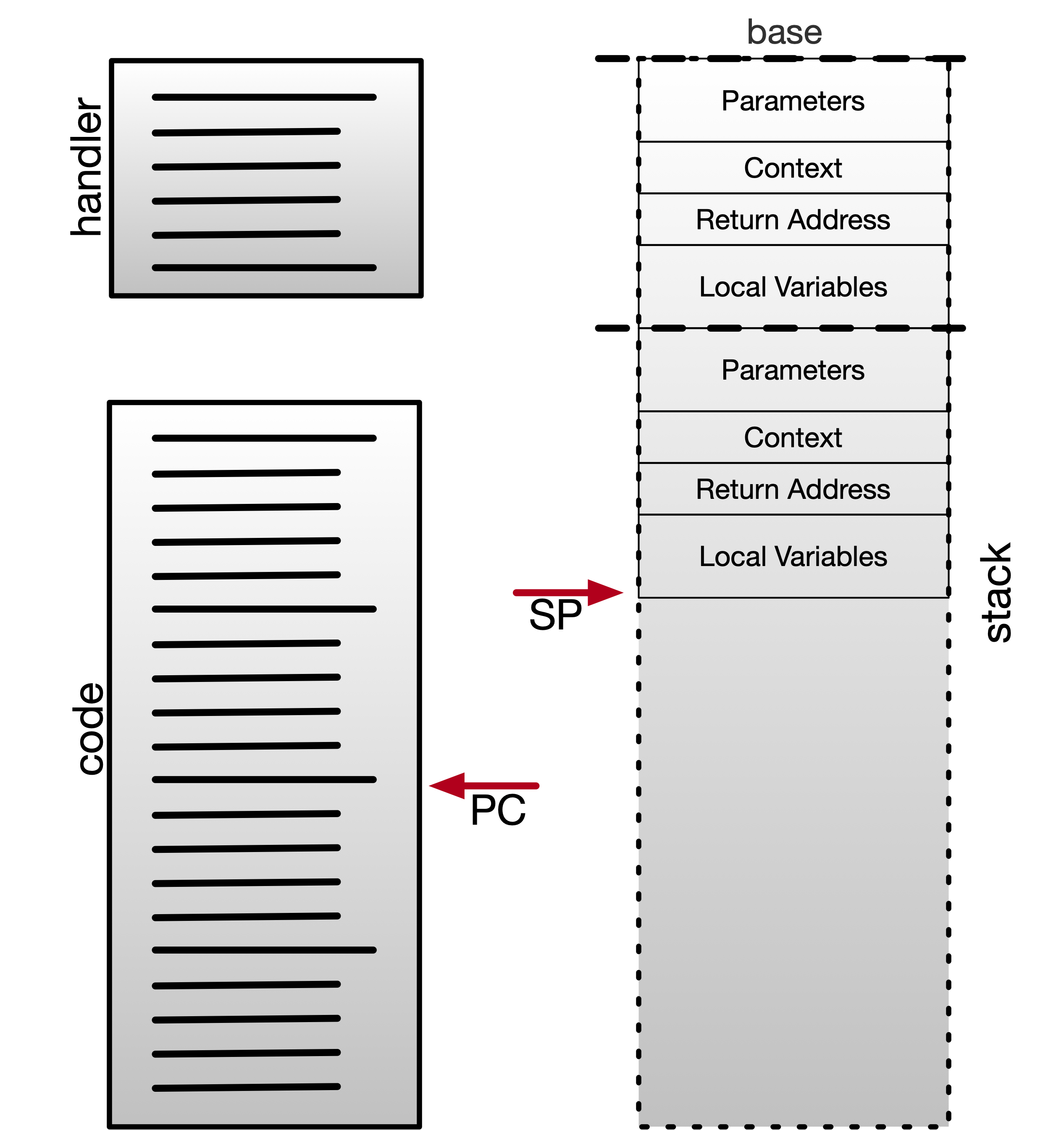
Return from interrupt (bx lr)
The “special” lr gets the CPU to put everything back the way it was! (Clever!)
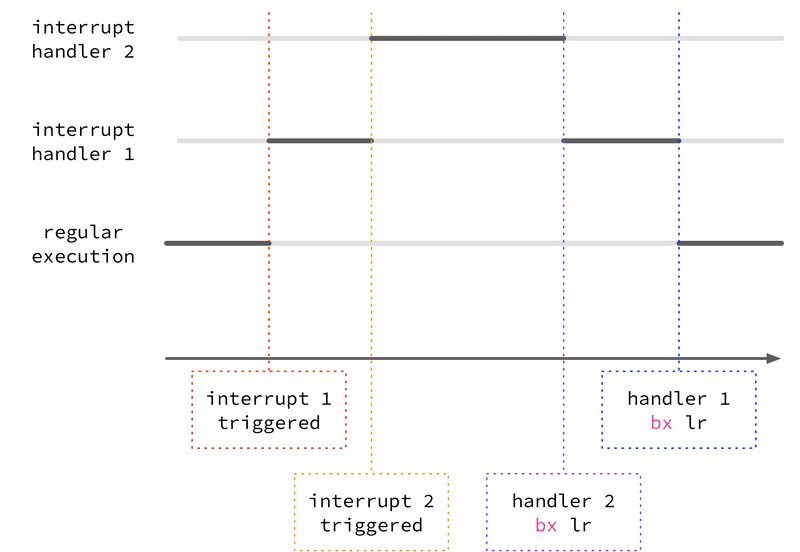
Interrupt Timeline…
- Save PC and flags on the stack (the CPU hardware does this for you!!)
- Now the PC is inside an interrupt handler (a function that has been set up previously to look after this interrupt)
- The link register
lrhas been set up with a special value! - Do our normal function things:
- push registers
- declare local variables
- ..do some I/O..
- ..run some time critical code..
- remove local variables
- pop registers
-
Return from interrupt (
bx lr)
Things to consider
- Interrupt handler code can also be interrupted!
- Which interrupts are more important? (we have priorities to handle this!)
- Can you overrun a stack with interrupt handlers?
- Can we have a “do not disturb” sign?
Interrupt Handler is a Function
You get to write it! (more on that later…)
But you don’t get to choose when it runs!
Interrupts in Practice
You’ve probably experienced an interrupt (exception) already!
What about “Usage Fault”?
Guaranteed interrupt in two clock cycles
ldr r0, =0x20000000
bx r0
N.B., the above code is broken on purpose! Your microbit will end up in the “Default_Handler”
How do we configure an interrupt?
- Need to enable the interrupt.
- Need to define the handler function.
- Need to configure hardware (if using MCU features).
Where are interrupt vectors defined?
Have a look in startup.S:
.section .rodata.vtable @ (r)ead-(o)nly(data), the .vtable suffix is just a way to uniquely identify this section in the linker
.word _stack_end
.word Reset_Handler
.word NonMaskableInt_Handler
.word HardFault_Handler
.word MemManage_Handler
...
All the interrupt vectors are named here, and linked to a default handler.
How do we take over an interrupt handler?
Need to redefine one of the handler functions. E.g., for GPIOTE_IRQHandler:
.global GPIOTE_IRQHandler
.type GPIOTE_IRQHandler, %function
GPIOTE_IRQHandler:
@ do some important stuff!
nop
bx lr
.size GPIOTE_IRQHandler, .-GPIOTE_IRQHandler
So I want to use the buttons…
Isn’t that similar to activating the LEDs?
A map to the buttons…
The microbit’s buttons are connected to pin P0.14 (A) and P0.23 (B).
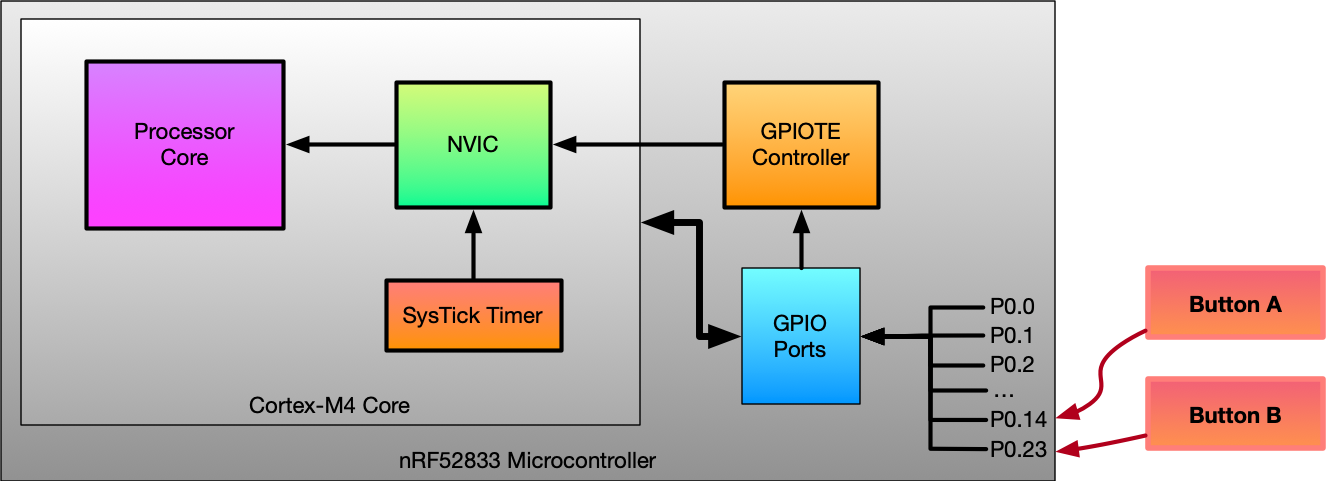
Connecting it all up
We need to configure the GPIOTE module to listen on P0.14, and configure the NVIC to make this happen. This is a little bit fussy!
- Configure the GPIOTE channel 0 to to be in “event” mode, associate with GPIO pin 14 and port 0 (the pin and port of the A button), and to to listen for low-to-high voltage events.
- Enable interrupts for events from GPTIOTE channel 0.
- Enable the GPIOTE interrupt in the NVIC, its ID number is “6”. For this you need to set bit “6” in the NVIC’s Interrupt Set Enable Register.
- Implement a function called GPIOTE_IRQHandler and make sure you have the .global GPIOTE_IRQHandler directive.
Let’s do it.
Interrupt archaeology
What about the interrupt handler function and the AAPCS?
link register lr?
status register xPSR?
caller-save registers (r0-r3)?
let’s look at an interrupt handler and do some digging…
Further Reading
http://bob.cs.sonoma.edu/IntroCompOrg-RPi/chp-except.html
Questions
Week 8 (part 2): Asynchronism
Where were we?
We just learned that an interrupt can stop our program at any time and run different code in the handler.
Returning from the handler puts our program back just the way it was before the interrupt.
SO your microbit is a starship...
Every starship has a captain (program)
Wait a minute... can we now run two programs?
we kind of can, folks!
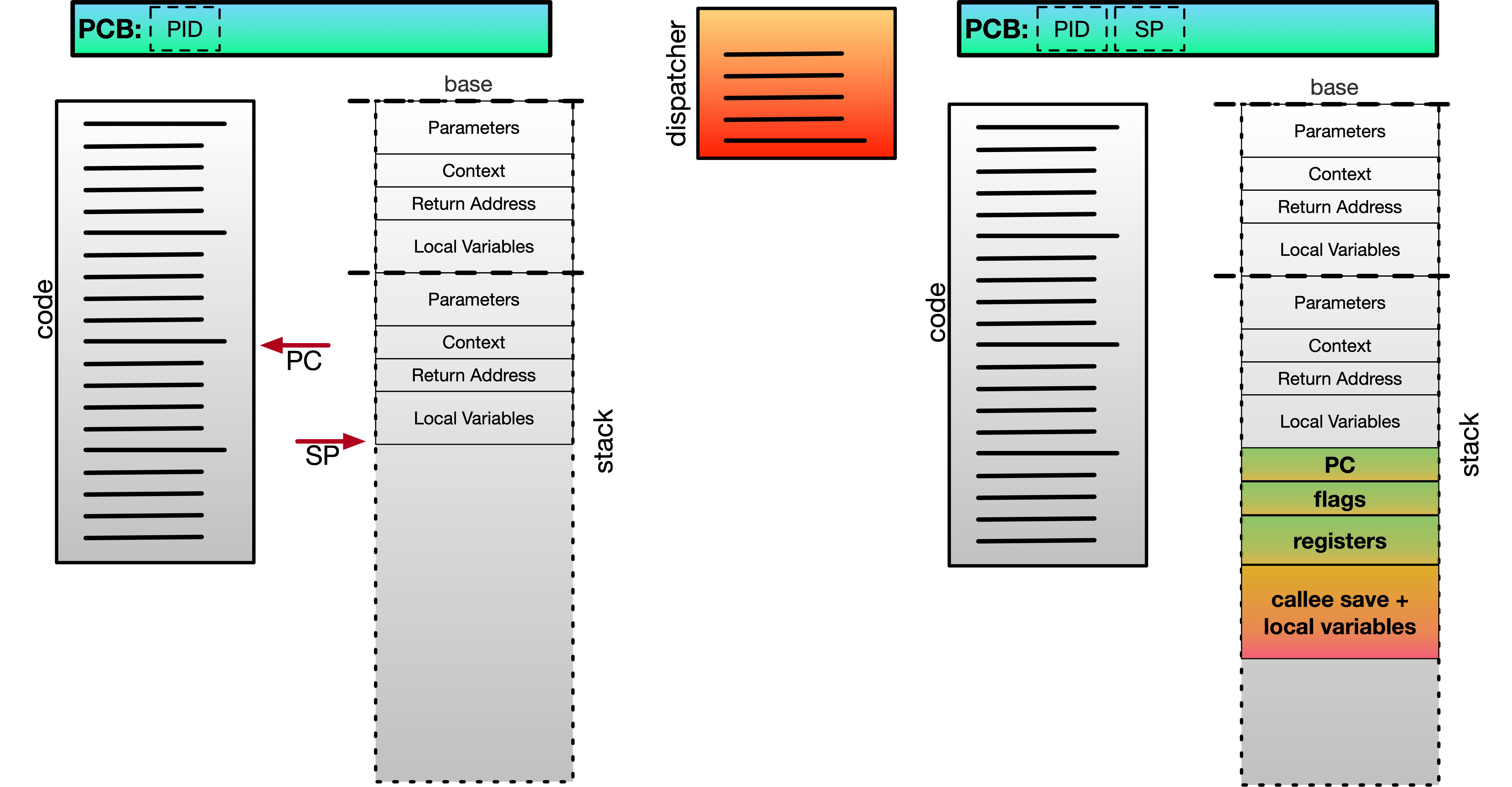
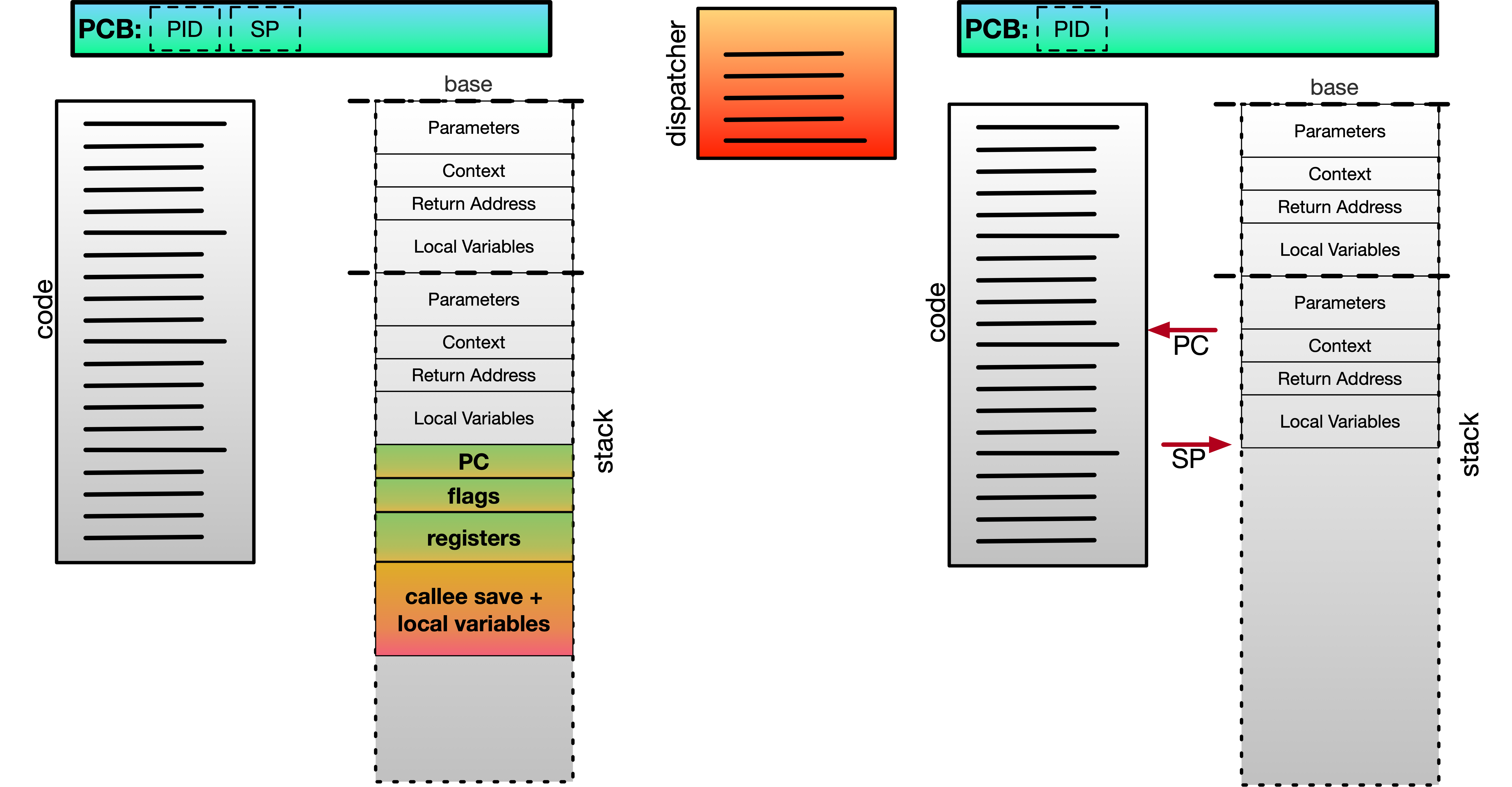
Context Switching
Big Idea:
Have two (or more) main programs and use interrupts to swap in between them.
But what is a context?
The set of information that needs to be saved for a program to start up again after an interruption.
Step 1: Before a context switch…
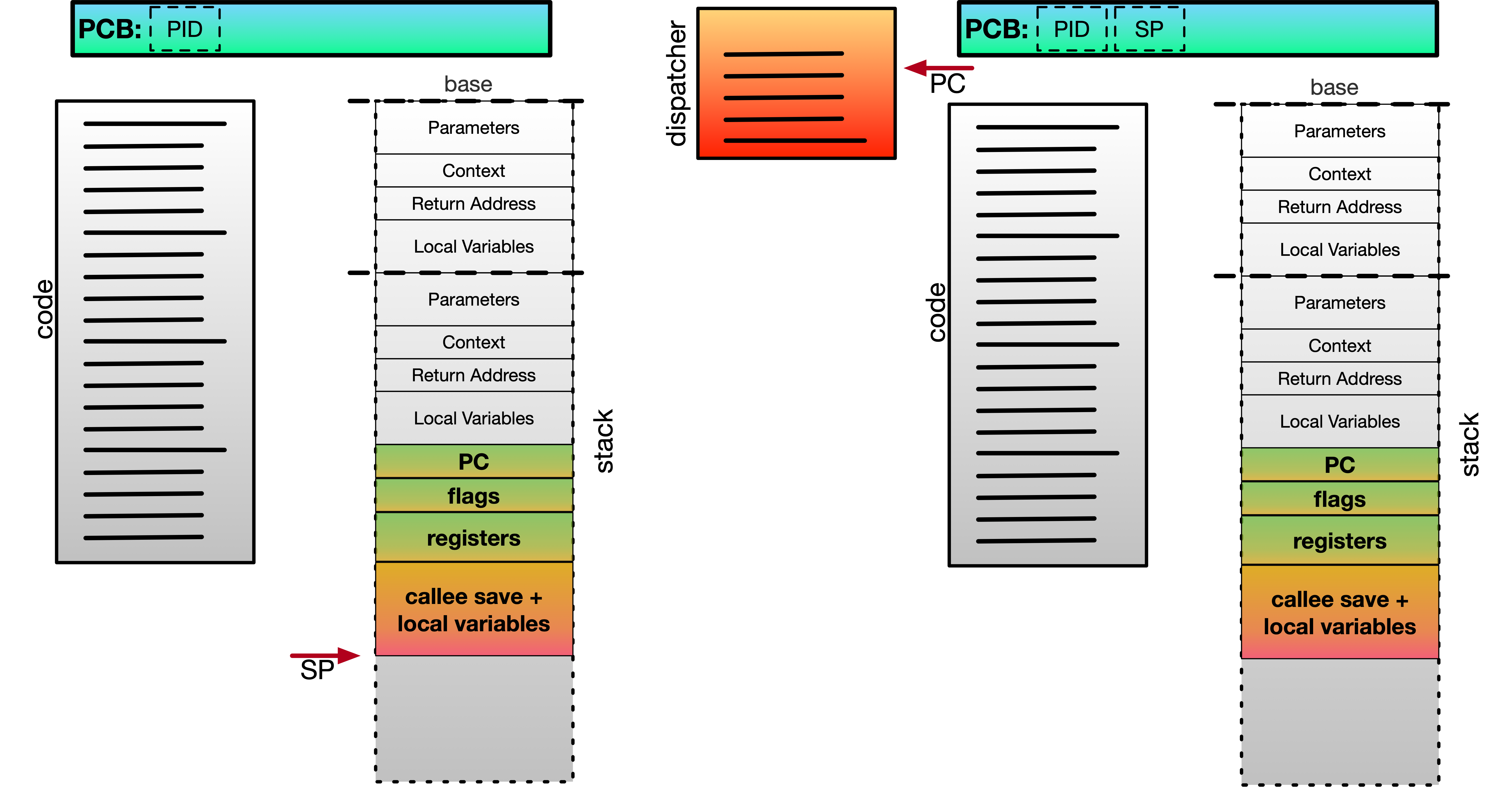
Step 2: Interrupt! And switch to dispatcher…
Step 3: Swapping to the new context…
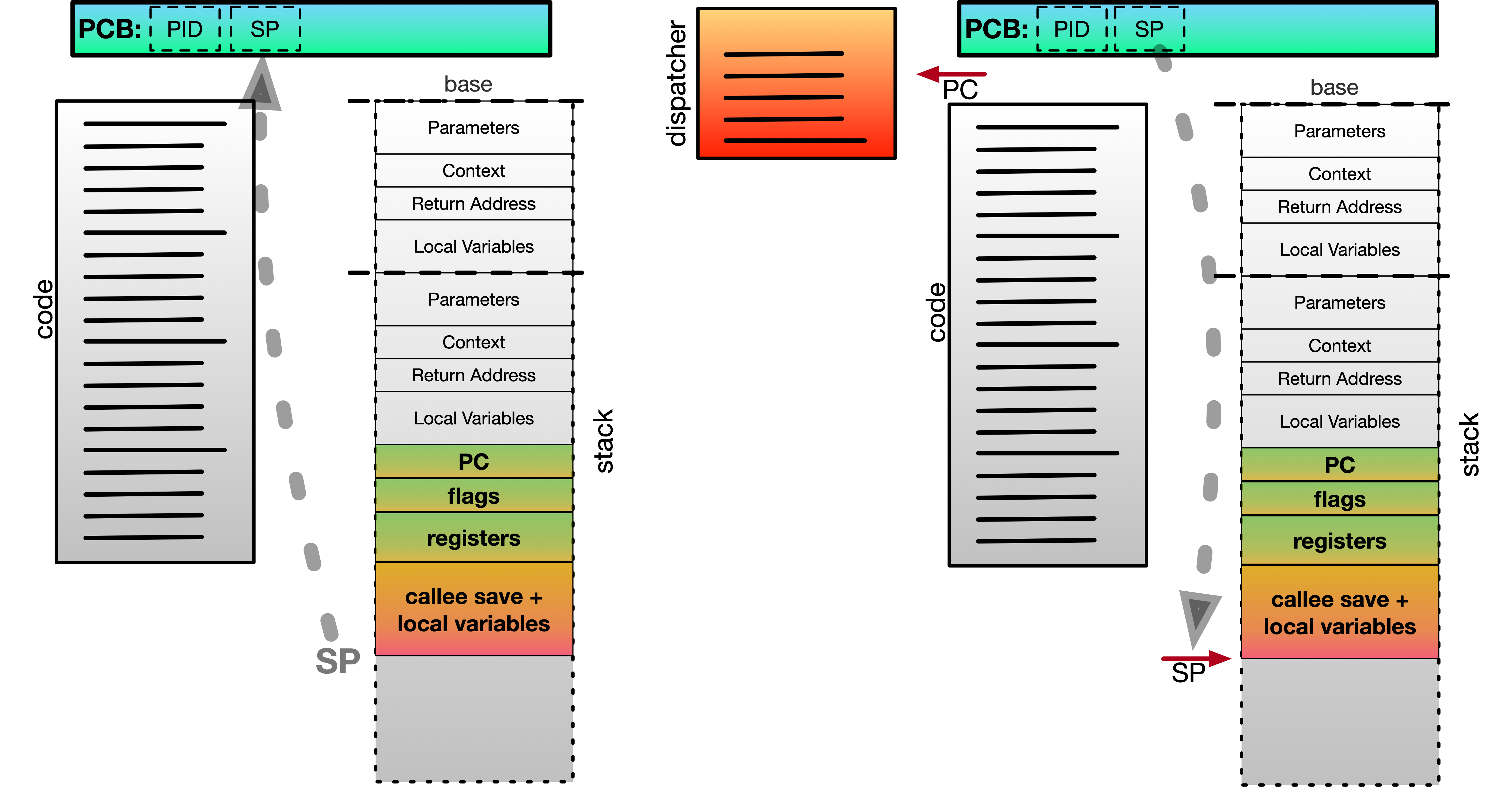
Step 4: Returning from dispatcher…
Will either program notice?
Would a program notice if it’s been switched out and back?
Could anything go wrong here?
What if both programs share data?
Concurrency and Synchronisation
What is the value of G?
int G = 0;
G = 1; G = G + G; |
G = 2; G = G + G; |
G = 3; G = G + G; |
What’s the value of G at the end?
What’s the smallest G that could be produced? What’s the largest?
What is the value of G?
G: .word 0x00000000
ldr r4, =G mov r1, #1 str r1, [r4] ldr r4, =G ldr r2, [r4] add r2, r2, r2 str r2, [r4] |
ldr r4, =G mov r1, #2 str r1, [r4] ldr r4, =G ldr r2, [r4] add r2, r2, r2 str r2, [r4] |
ldr r4, =G mov r1, #3 str r1, [r4] ldr r4, =G ldr r2, [r4] add r2, r2, r2 str r2, [r4] |
What are the values of G that we can see now?
The too-much-milk problem
Fact 1: There are two roommates
Fact 2: When a roommate gets home, they open the fridge. If there is no milk, they go out to get some.
Now what is going to happen? What is the solution?
Solutions to the Too-Much-Milk Problem!
- a note? “I’ve gone to get milk!”
- a lock on the fridge door?
- two fridges? (ok now the analogy is going too far…)
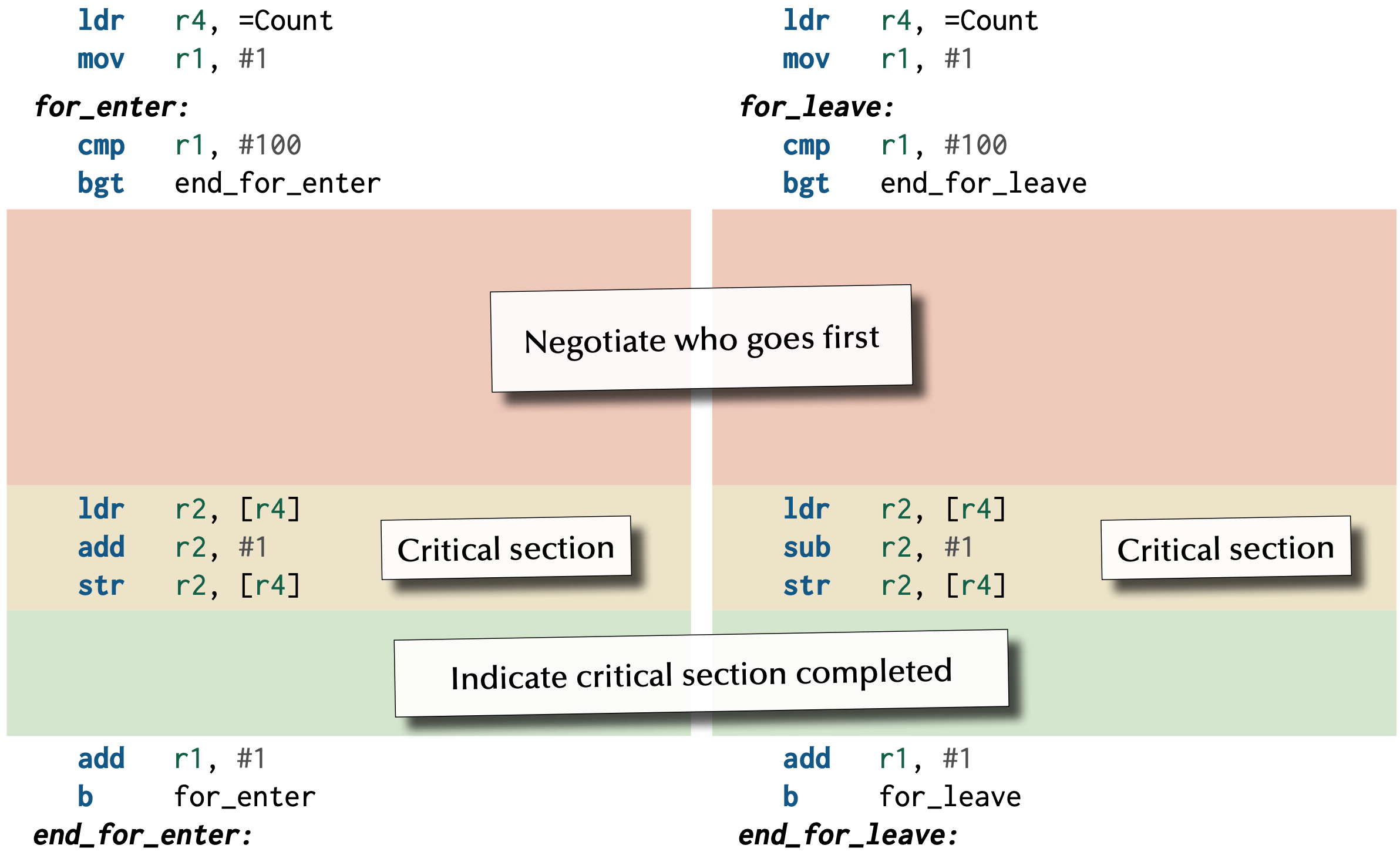
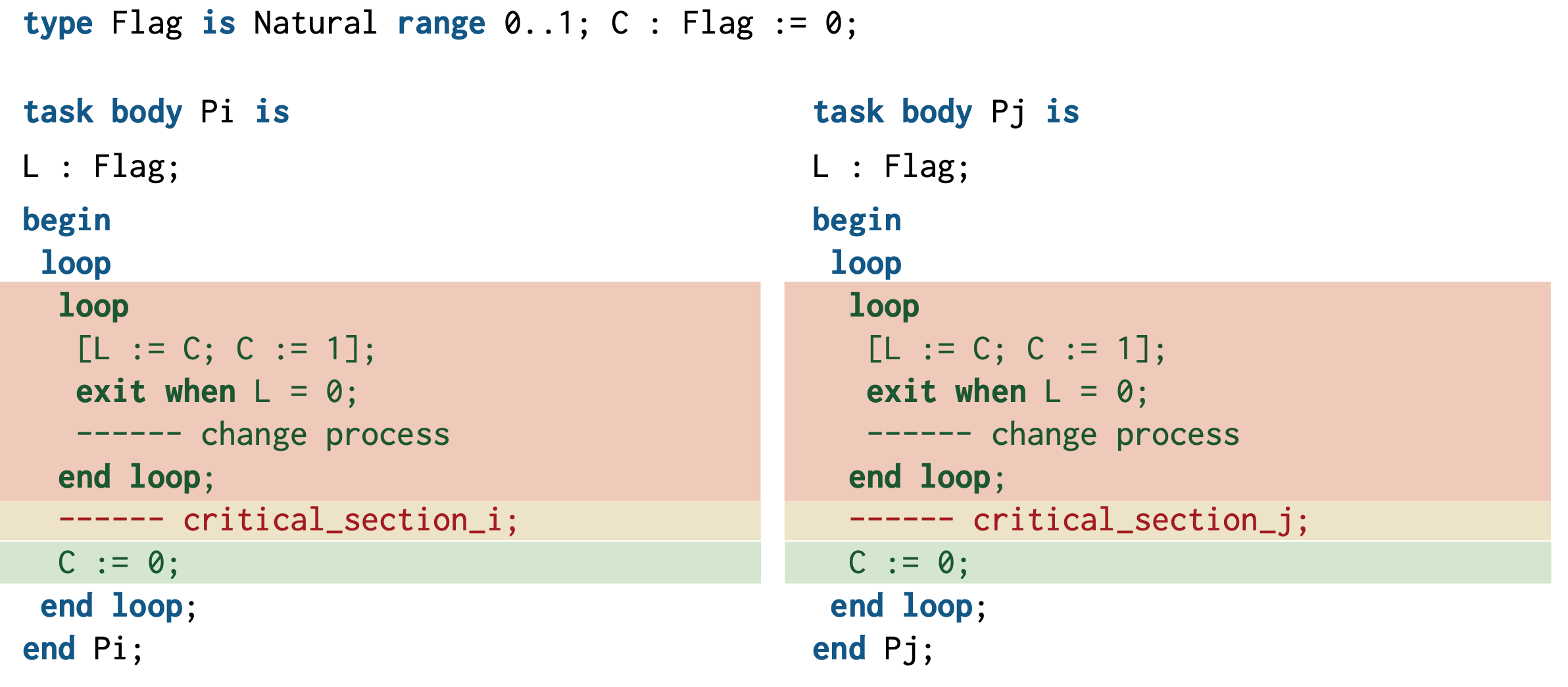
Mutual Exclusion
A “critical section” is a section where a program is accessing a shared resource.
We need a way to ensure that only one process can enter a critical section at a time.
This is called “mutual exclusion”.
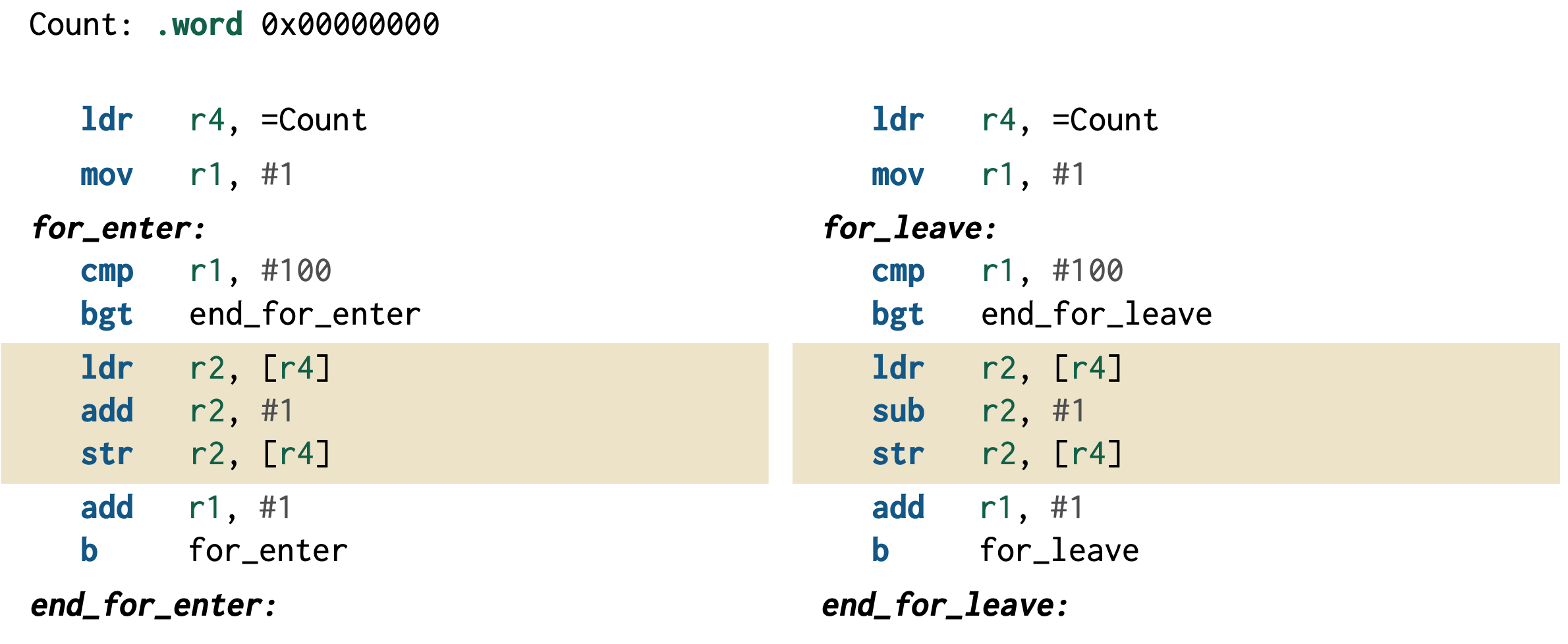
What happens without?
int count = 0;
for (i = 1; i <= 100; i++) {
count = count + 1;
}
|
for (i = 1; i <= 100; i++) {
count = count - 1;
}
|
What happens without?
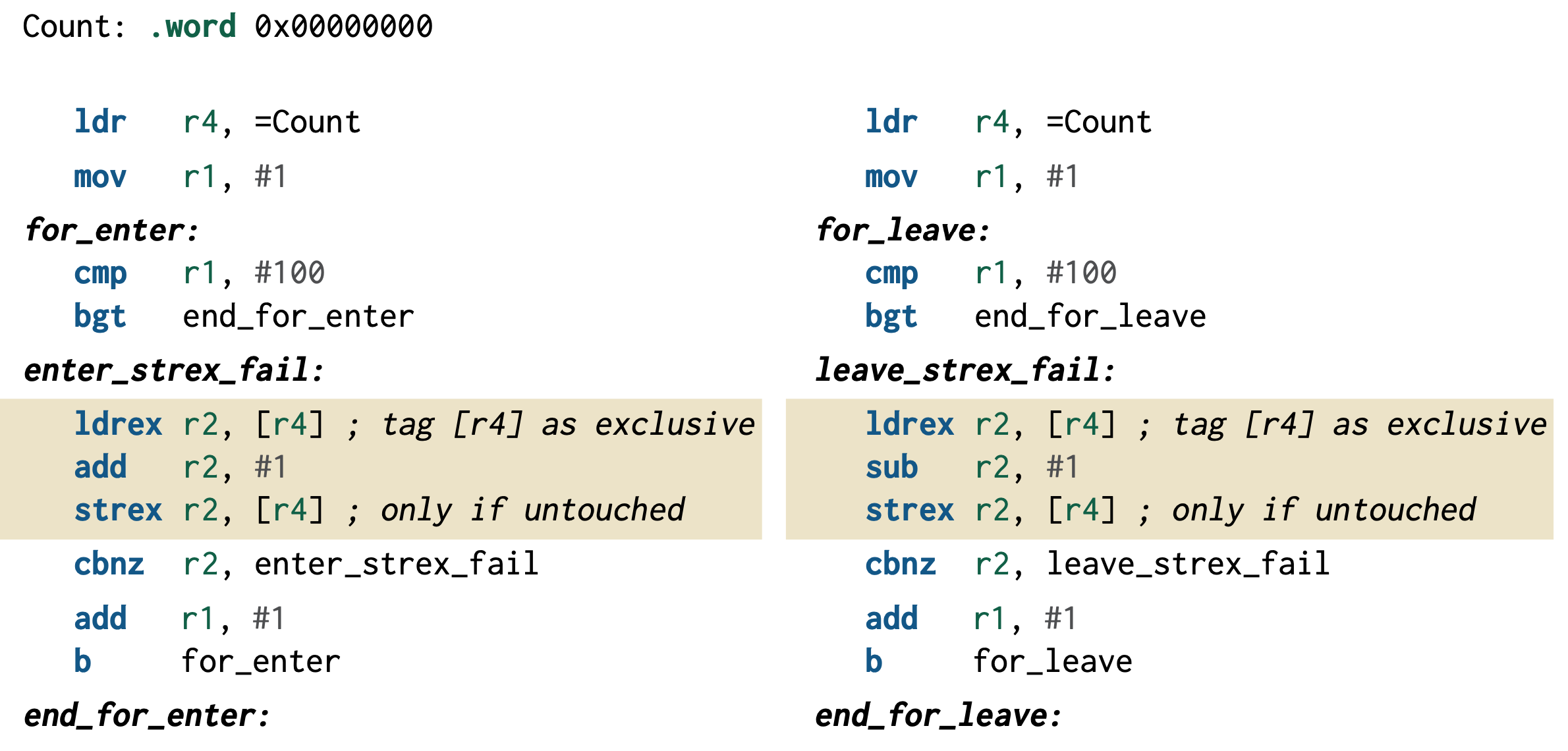
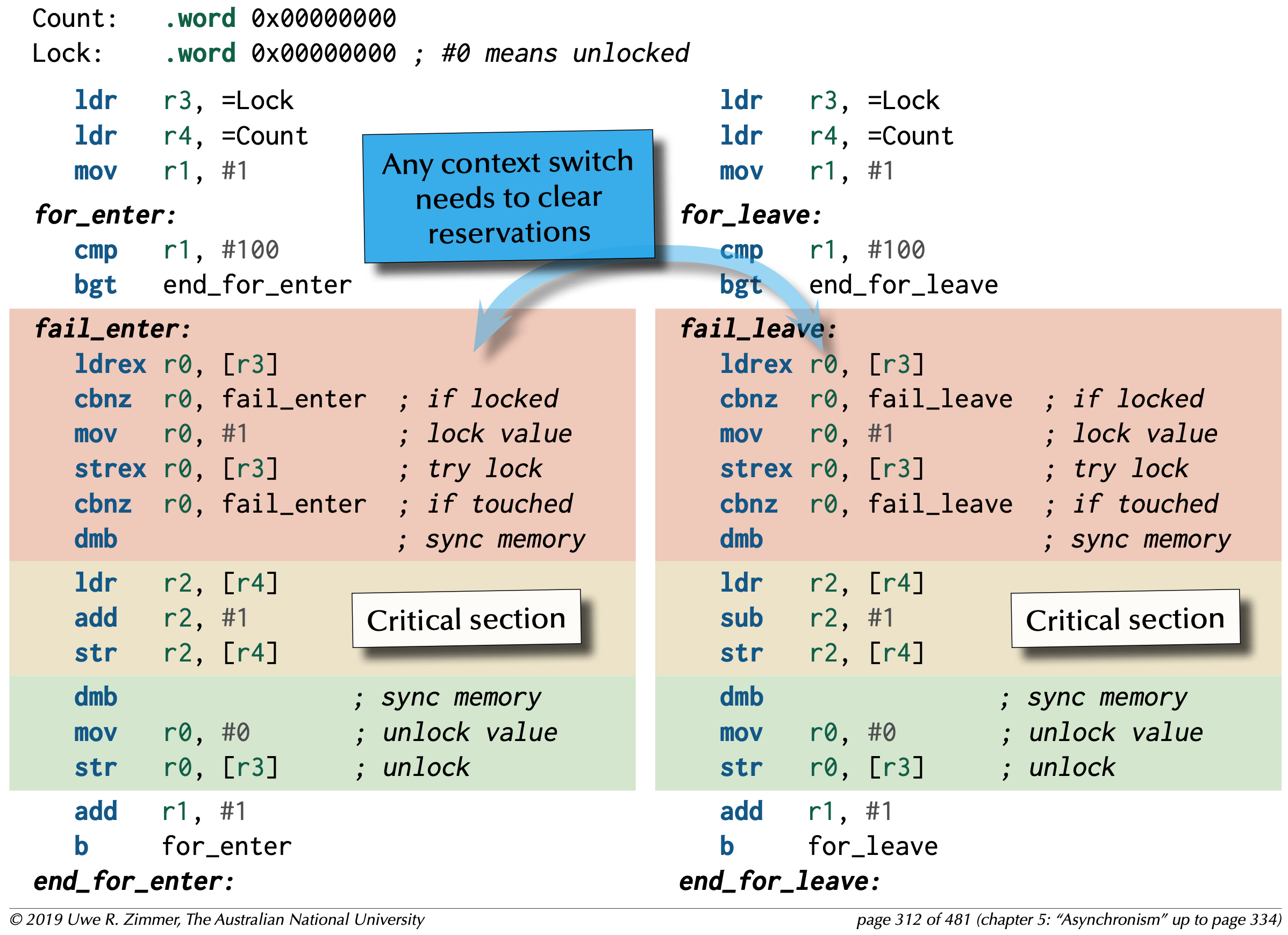
What does ARMv7-M give us?
Can we improve this?
Using a “lock” variable
Alternatives to strex and ldrex
Atomic Operations
An atomic operation is one that either happens completely, or not at all.
It’s indivisible.
There’s lots of operations we need to be atomic… (e.g., bank transfers)
(Photo by Dan Meyers on Unsplash)
Alternatives: Atomic Test-and-Set Operation
- a special instruction to read a value, and set as a new value atomically.
“keep reading the lock (and setting it to 1) until you find it open”
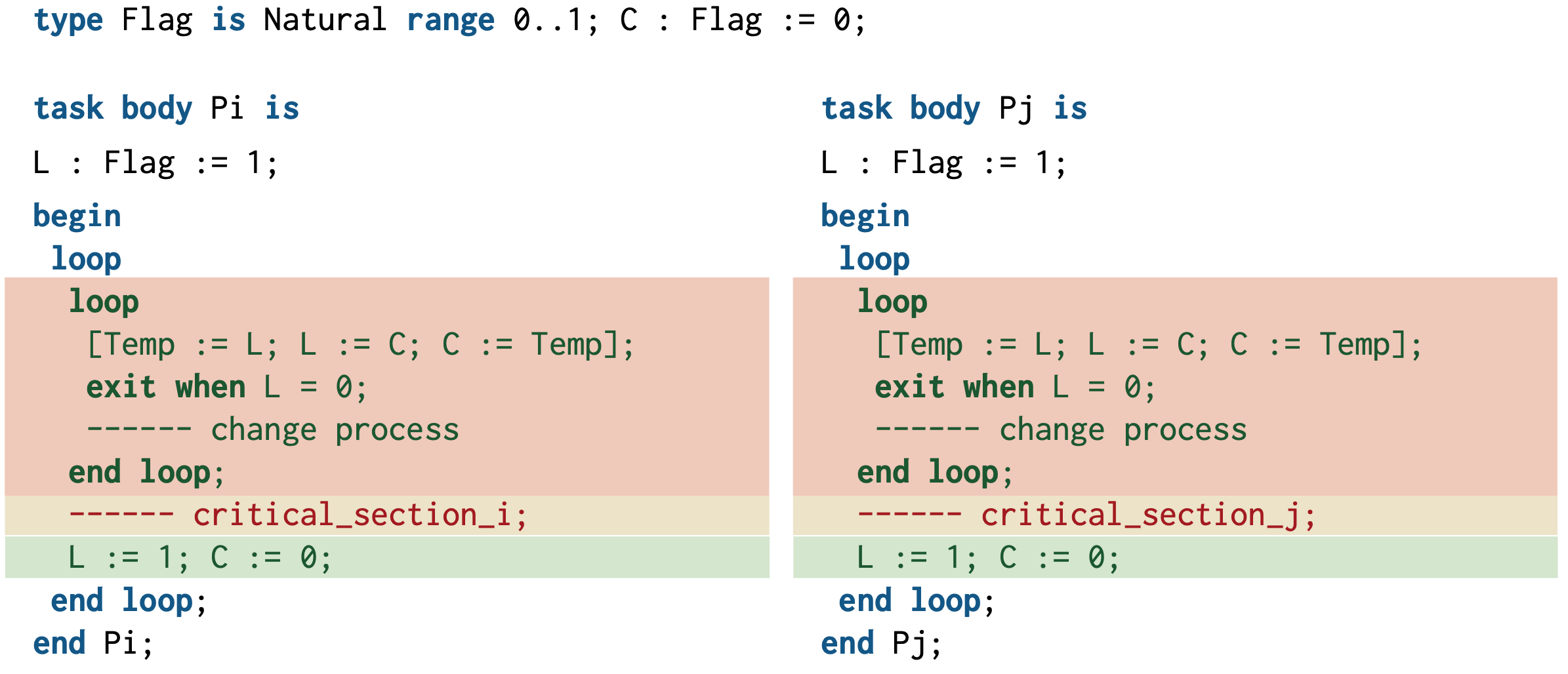
Alternatives: Atomic Exchange Operation
- special instruction to atomically swap two values.
- similar idea…
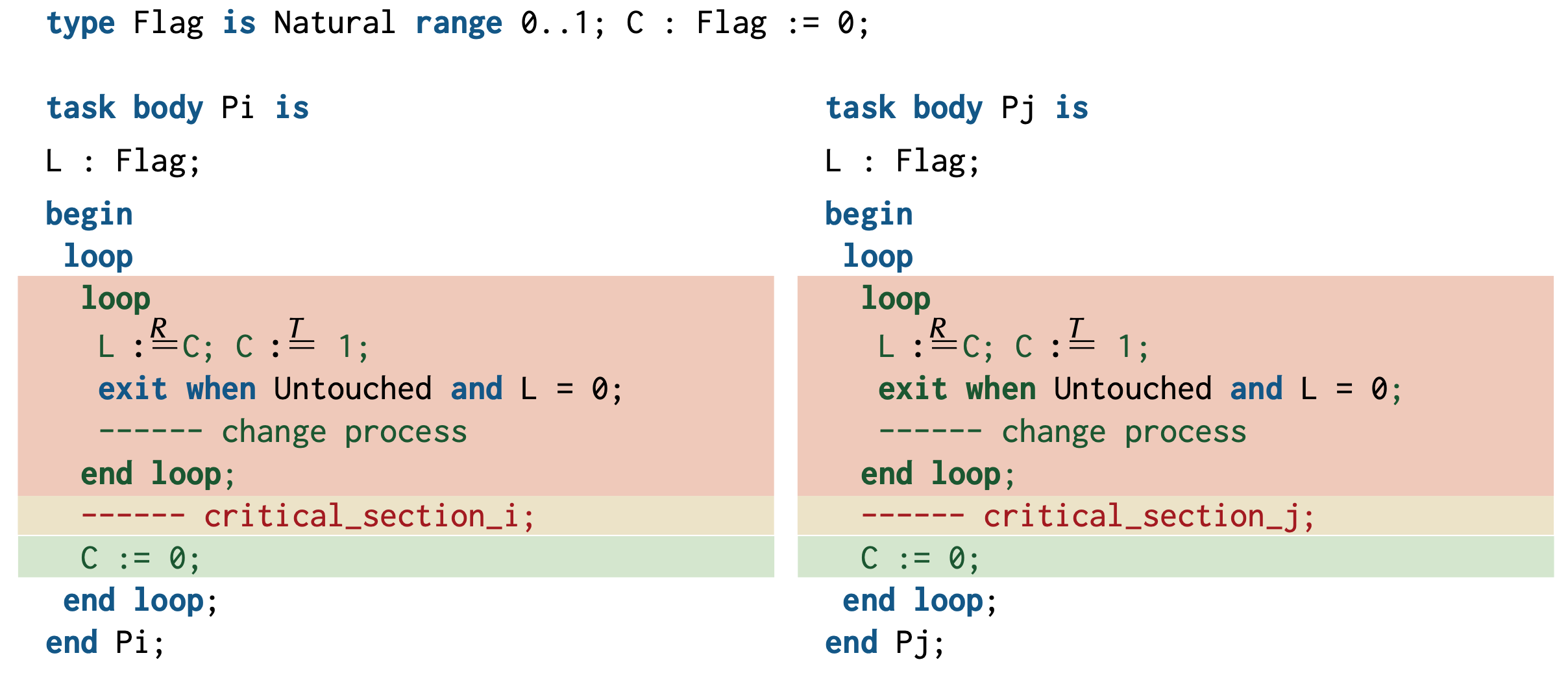
ARMv7-M Memory Cell Reservation
This is what we have! Also called “load-link/store-conditional”.
Semaphores
A semaphore (Dijkstra, 1968) is a generalisation of our lock to handle common resources more generally.
We define a semaphore variable (S), and two operations:
Wait(S): if S > 0, then S := S - 1 and continue, else wait
Signal(S): S := S + 1, tell someone waiting to try again
So S could start at 1 (binary) or a higher number.
This happens all the time!
Concurrency is not an edge case! It’s needed all the time.
Multi-task, and multi-CPU systems require hardware support for concurrency.
Now you know the hardware operations that can support synchronisation implementations in your code.
In general, higher abstractions and safer solutions are provided; learn more in COMP2310!
Let's try it on a microbit: LDREX
ldr r0, =label_in_data_section
ldrex r1, [r0]
ldrex loads r1 with the memory that r0 is pointing to, and sets the “local exclusive monitor” to exclusive.
It doesn’t do any checking of the exclusive monitor before doing so!
The local exclusive monitor is just 1-bit! Either “open” or “exclusive”.
(Multi-processor systems also have a “global exclusive monitor”… not covered here!)
STREX
ldr r0, =label_in_data_section
mov r1, 5
strex r2, r1, [r0]
cmp r2, 0
bne do_something_to_recover
strex tries to store r1 in the memory that r0 is pointing to, but checks the exclusive monitor first.
If the store is allowed, r2 is set to 0, if it fails then r2 is set to 1.
Then what should we do?
When can a strex actually fail?
Need to look in the ARMv7-M reference manual (Section A3.4 “Synchronisation and Semaphores”)
- If address of
strexis tagged exclusive in the local monitor; then store takes place (woo hoo!) - If address of
strexis NOT tagged exclusive; then it is “implementation defined” whether the store takes place (????).
Local Exclusive Monitor
“Any ldrex operation updates the tagged address to the most significant bits of the address… used for the operation.” (ARMv7-M reference manual)
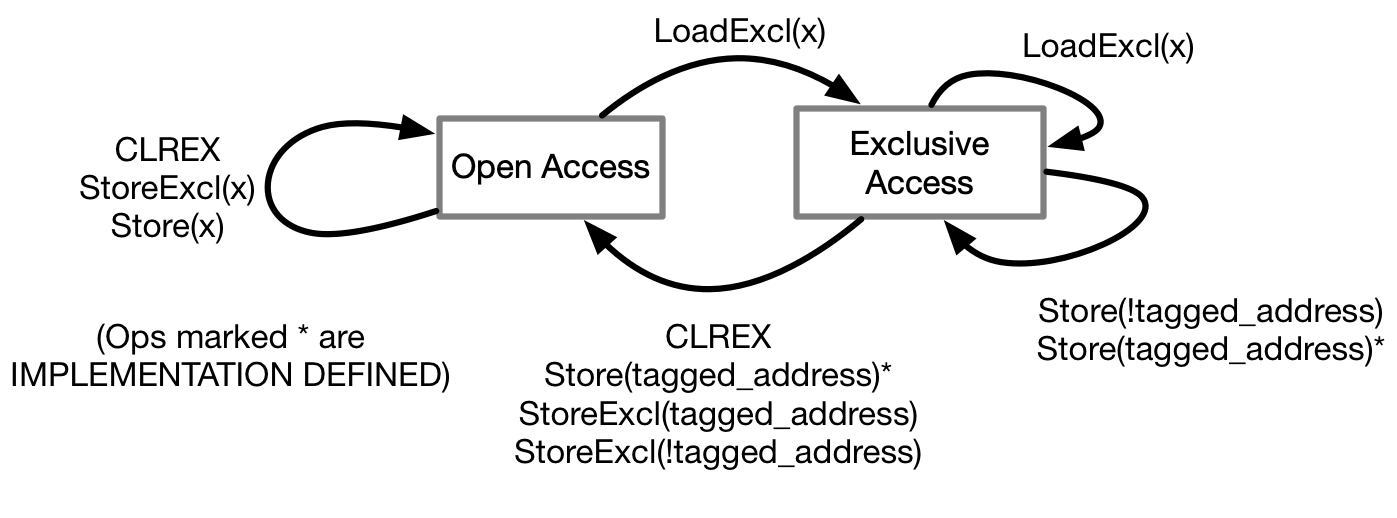
Note that clrex always clears the monitor, and that interrupt handlers run clrex!
Further Reading
G. Taubenfeld. Concurrent programming, mutual exclusion (1965; Dijkstra), Encyclopedia of Algorithms (2008) 188–191 http://www.faculty.idc.ac.il/gadi/MyPapers/2008T-mutex.pdf
Wikipedia: Load-link and store conditional
Making a `millis` function
Is there a smarter way to measure time on the microbit?
How about a function that tells you how much time has passed?
On an Arduino or in p5 or Processing you can call millis() which returns how long your program has been running in milliseconds. How does that work?
Millis Function
@ returns: r0, number of milliseconds since starting
.type millis, %function
millis:
ldr r0, =milliseconds_count
ldr r0, [r0]
bx lr
.size millis, . - millis
.global SysTick_Handler
.type SysTick_Handler, %function
SysTick_Handler:
@ update the milliseconds count.
ldr r0, =milliseconds_count
ldr r1, [r0]
add r1, r1, #1
str r1, [r0]
bx lr
.data
milliseconds_count:
.word 0x0
Setup
@ enable SysTick - lower three bits of SYST_CSR (SysTick Control and Status Regsiter)
ldr r0, =ADR_SYST_CSR
ldr r1, =0b111 @ (enable systick, enable interrupt, set CPU as clock source)
str r1, [r0]
@ Store a reload value in SYST_RVR (Reload Value Register)
ldr r0, =ADR_SYST_RVR
ldr r1, =64000 @ 1ms @ 64MHz
str r1, [r0]