Twenty Three Hundred
Revision
Dr Charles Martin
Semester 1, 2022

Admin Time
It's been a journey...
What was this course about again?
Digital Logic
Digital Logic Topics (in short):
- Boolean Algebra
- Combinatorial Logic Functions
- Digital Electronics - Logic Gates
- Binary Encoding, and 2’s-Complement
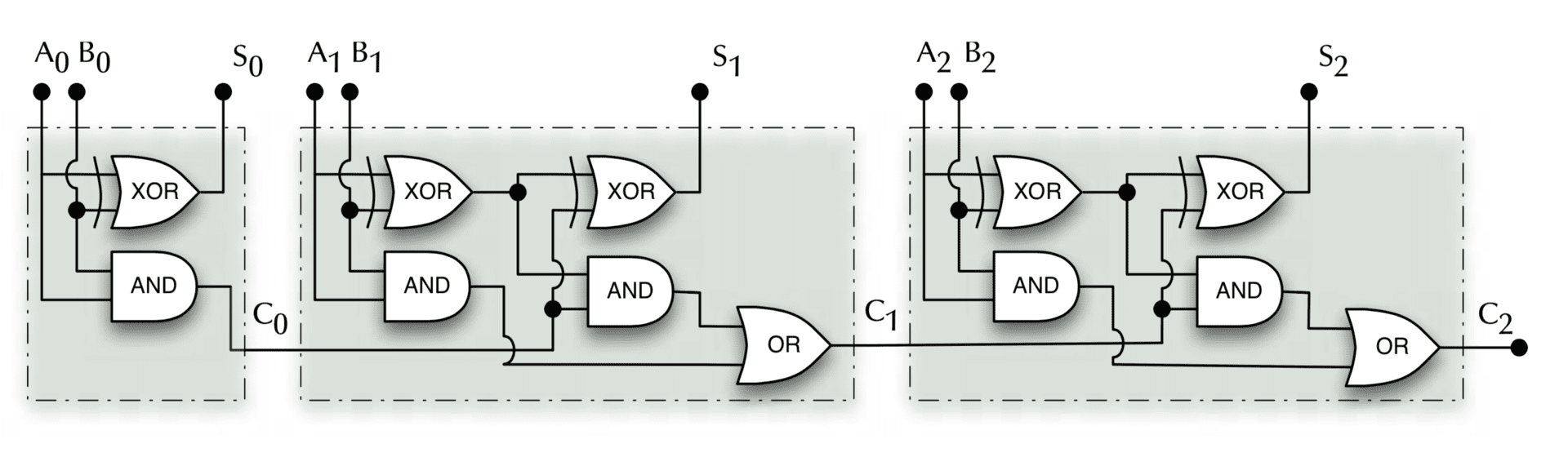
- Adders: Half, Full, Ripple Carry
- Arithmetic Logic Unit
- Simple CPU Architecture
Logic gates
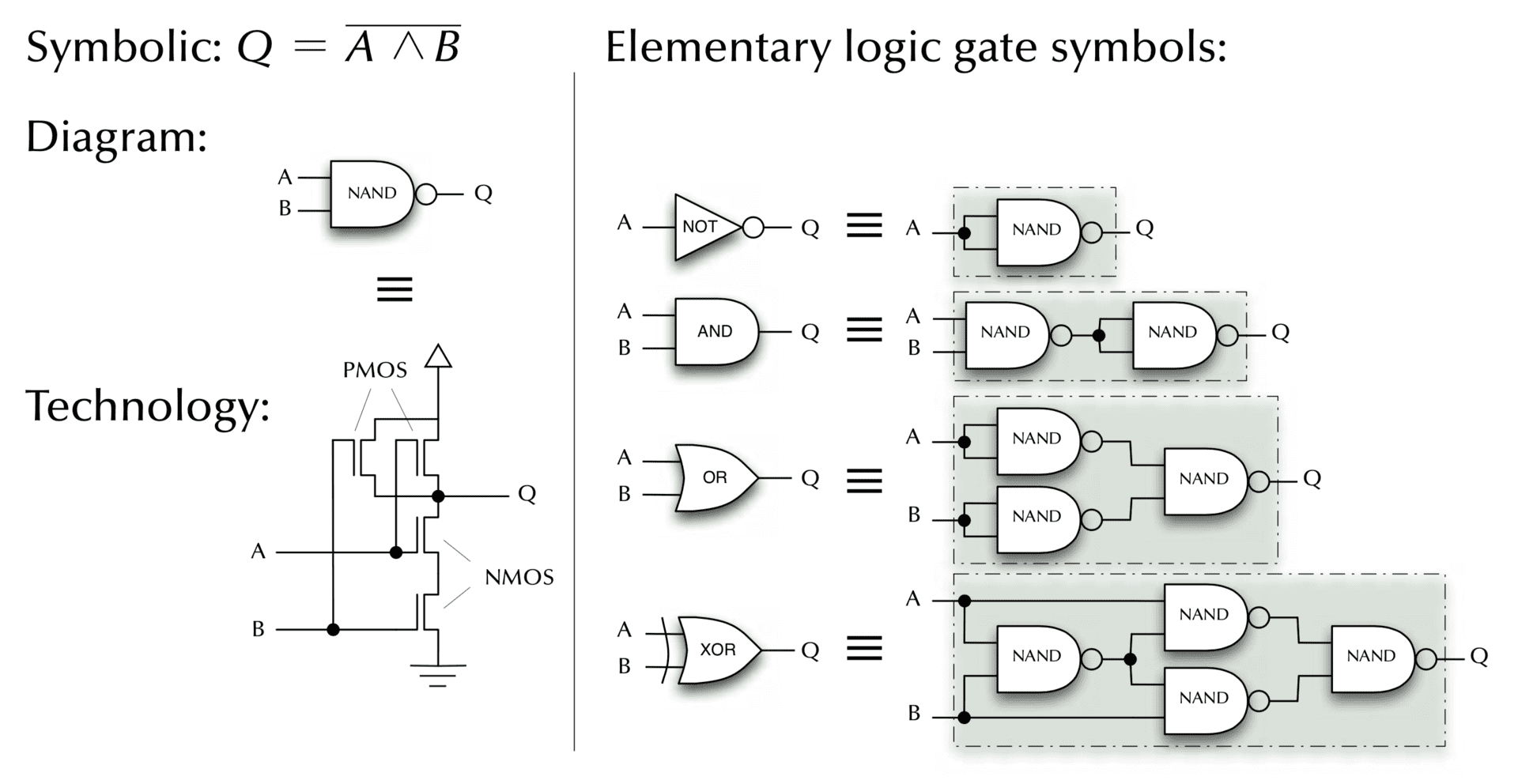
All gates can be represented by NAND or NOR.
talk
- how many bits can be added together?
- how long does it take?
- where does the final carry bit go?
Twos complement representation
The basic idea: define (binary) negative numbers so the adder works.
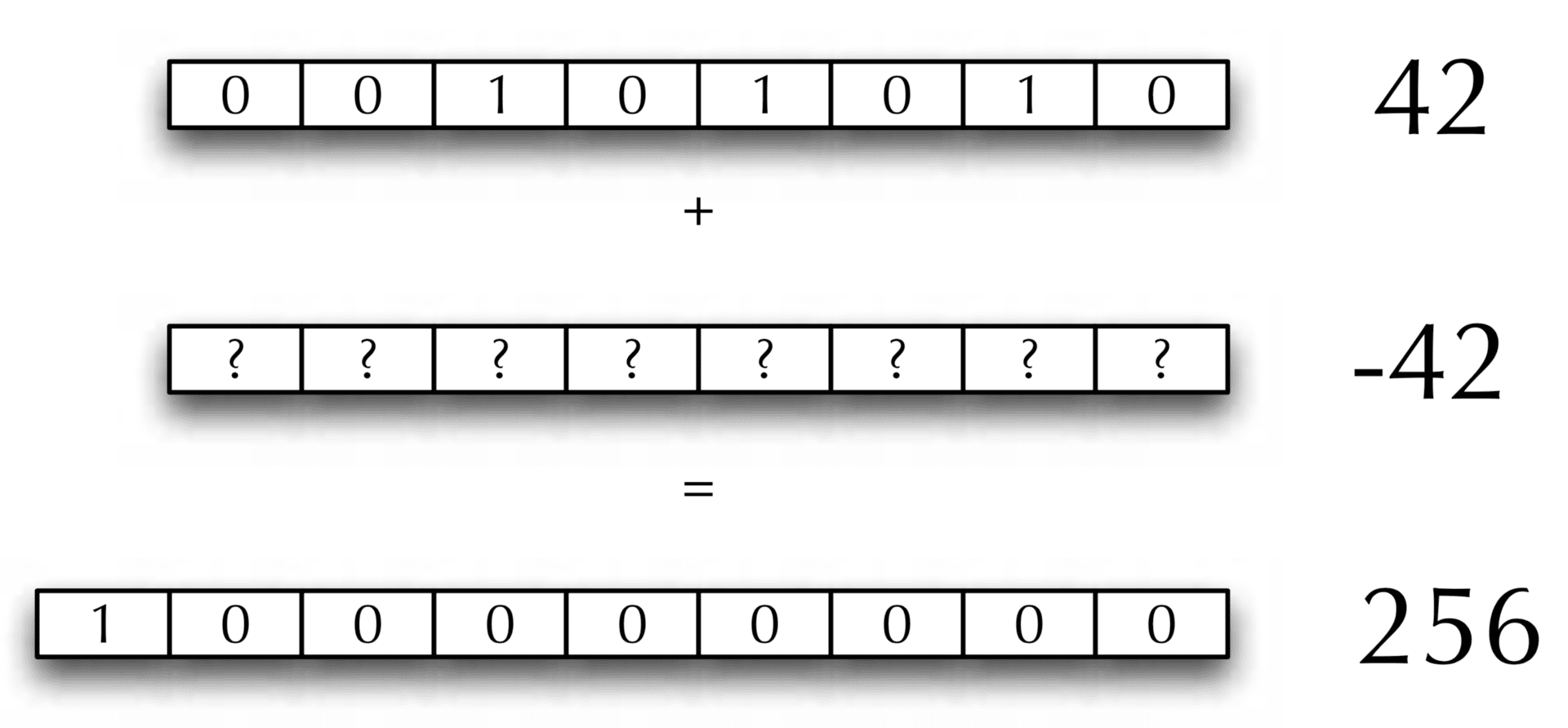
How do we make a number negative? Invert bits and add one! Why does that work?
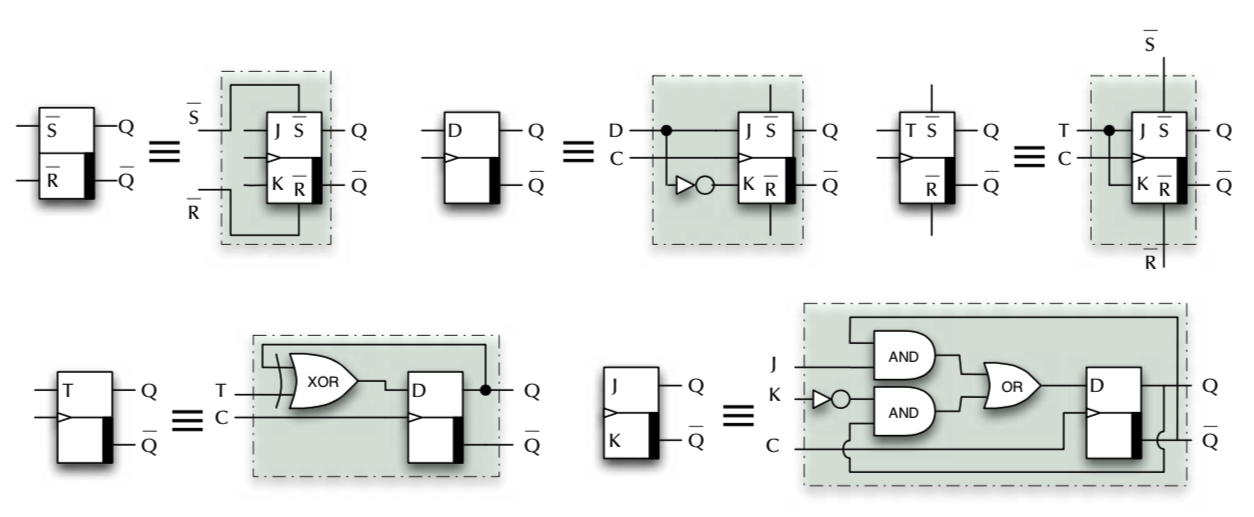
Flip-flops
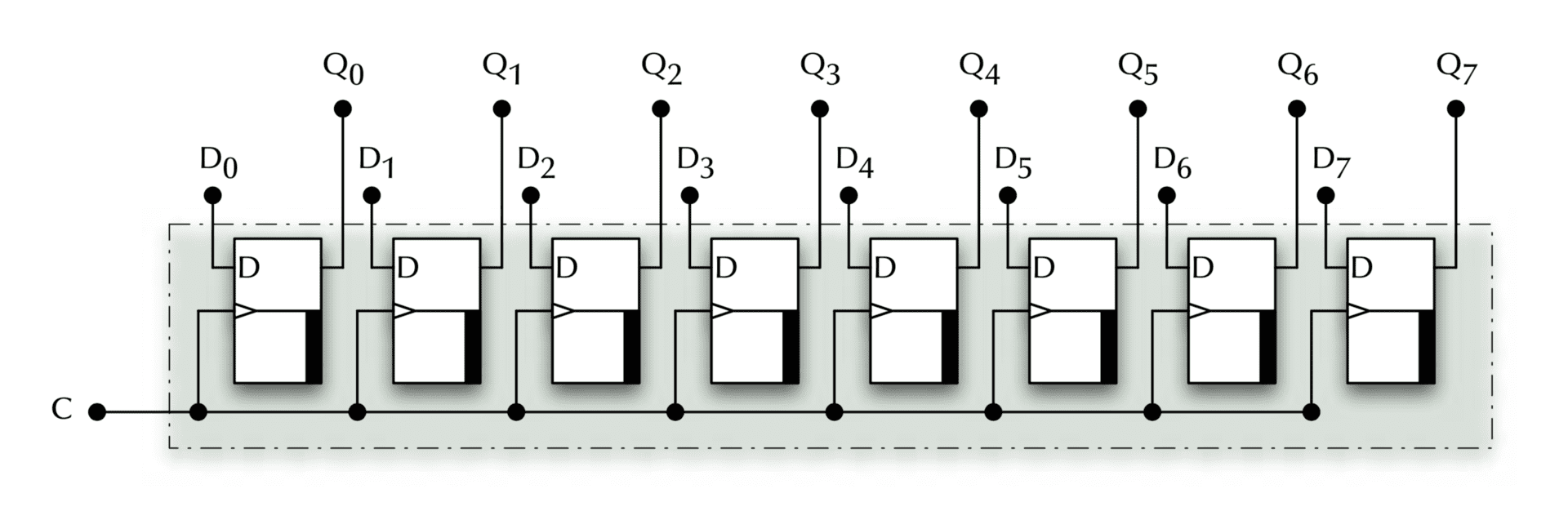
talk
What’s the difference between Boolean algebra, combinational logic, and sequential logic?
Why do we need all three of these things to describe computers?
Are there parts of the story missing from this course?
CPU Architecture
What are the main components of a CPU?
Can you explain what each of these components do?
We come back to this later…
Hardware/Software Interface
Hardware/Software Interface Topics (in short)
- Structure of an instruction
- Assembly to CPU instructions
- CPU Status Flags (NCZV)
- ARM v7 instructions (adding, subtracting, moving, rotate/shift, bit-wise ops)
- loading and storing from memory
- branch instructions
- Contents of Quick Ref. Card
NCZV Flags
- Negative
- Zero
- Carry
- Overflow
Negative
This status flag is set when the result of an ALU operation is negative if interpreted as a twos complement signed integer
movs r0, 5
movs r1, 6
subs r2, r0, r1
don’t forget the s suffix
Zero
This status flag is set when the result of an ALU operation is zero
movs r5, 5
movs r6, -5
adds r4, r5, r6
Carry
This status flag is set when the result of an ALU operation requires a “carry out” if interpreted as an unsigned 32-bit integer (i.e. it requires 33 or more bits to represent)
movs r2, 0xFF000000
movs r3, 0xFF000000
adds r5, r2, r3
Overflow
This status flag is set when the result of an ALU operation would overflow the min/max value if interpreted as a twos complement signed integer
movs r0, 0x7FFFFFFF @ largest signed integer
adds r0, 1
movs r0, 0x80000000 @ smallest signed integer
subs r0, 1
talk
movs r0, 5
movs r1, 6
subs r2, r0, r1
What flags will be set after the subs instruction is executed?
ARM is a load-store architecture
Instructions are either:
- ALU operations which take inputs and save results to registers, or,
- memory access operations which just save and load from memory
What does this mean for the programmer?
Loading and Storing
Load:
mov r1, 0x20000000 @ put the address in r1
ldr r0, [r1] @ load the data into r0
Store:
mov r0, 42
mov r1, 0x20000000
str r0, [r1]
Extra Operations
Load less than 32 bits
ldrb @ load byte from register
ldrh @ load halfword from register
strb @ store byte to register
strh @ store halfword to register
Negative Stack
stmdb <Rs>!, {Rgstrs} @ store multiple decrement before
ldmia <Rs>!, {Rgstrs} @ load multiple increment after
push {Rgstrs}
pop {Rgstrs}
Conditional branch examples
beq <label> @ branch if Z = 1
bne <label> @ branch if Z = 0
bcs <label> @ branch if C = 0
bcc <label> @ branch if C = 1
bmi <label> @ branch if N = 1
bpl <label> @ branch if N = 0
bvs <label> @ branch if V = 1
bvc <label> @ branch if V = 0
Functions
Functions Main Topics (in short)
- There and back again,
bl,bx, andlr - The stack
- Calling conventions
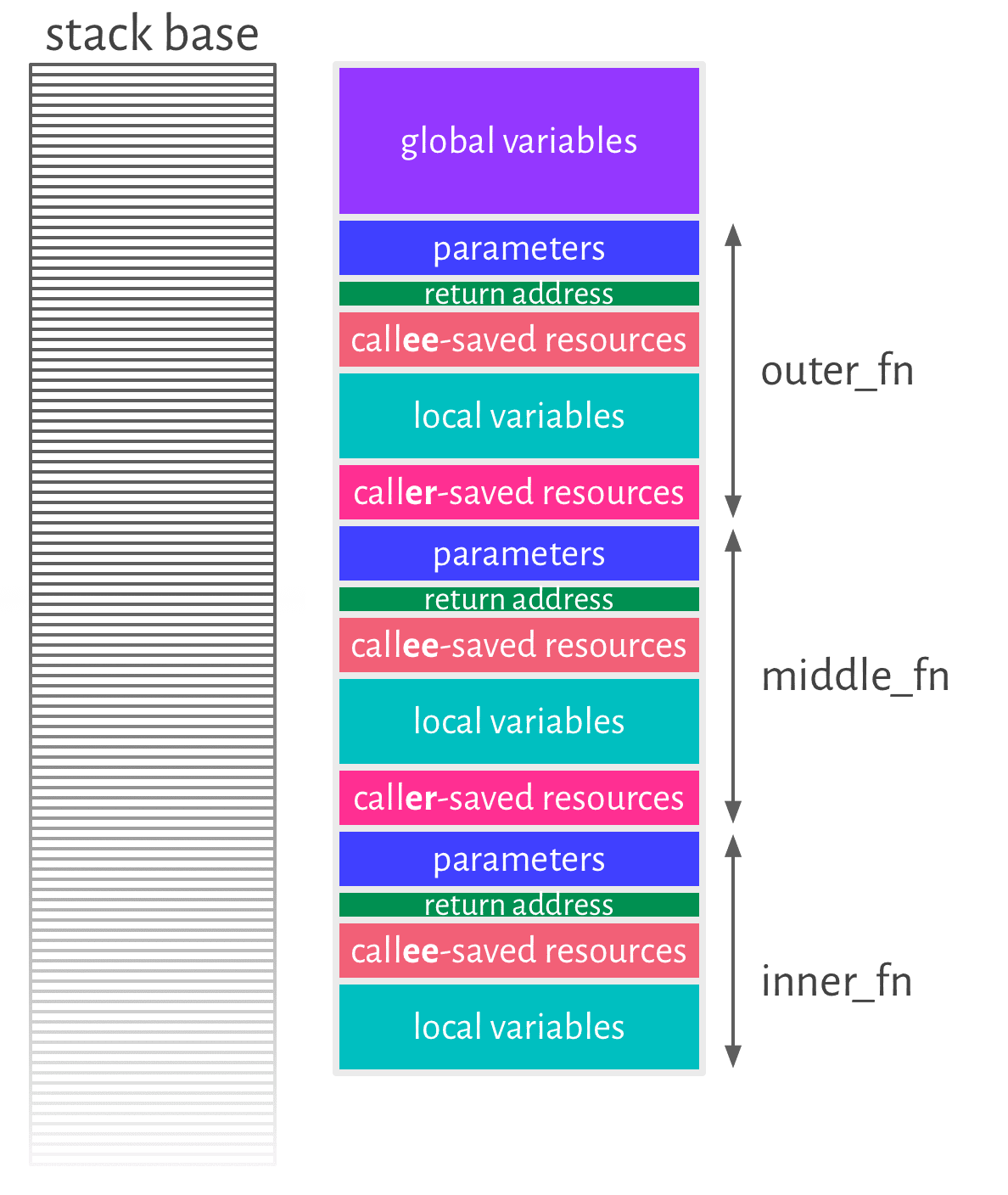
- Functions calling functions
- Functions calling themselves! (a.k.a. recursive functions)
- Local variables, and the stack frame (incl.
spandfp) - Relative addressing
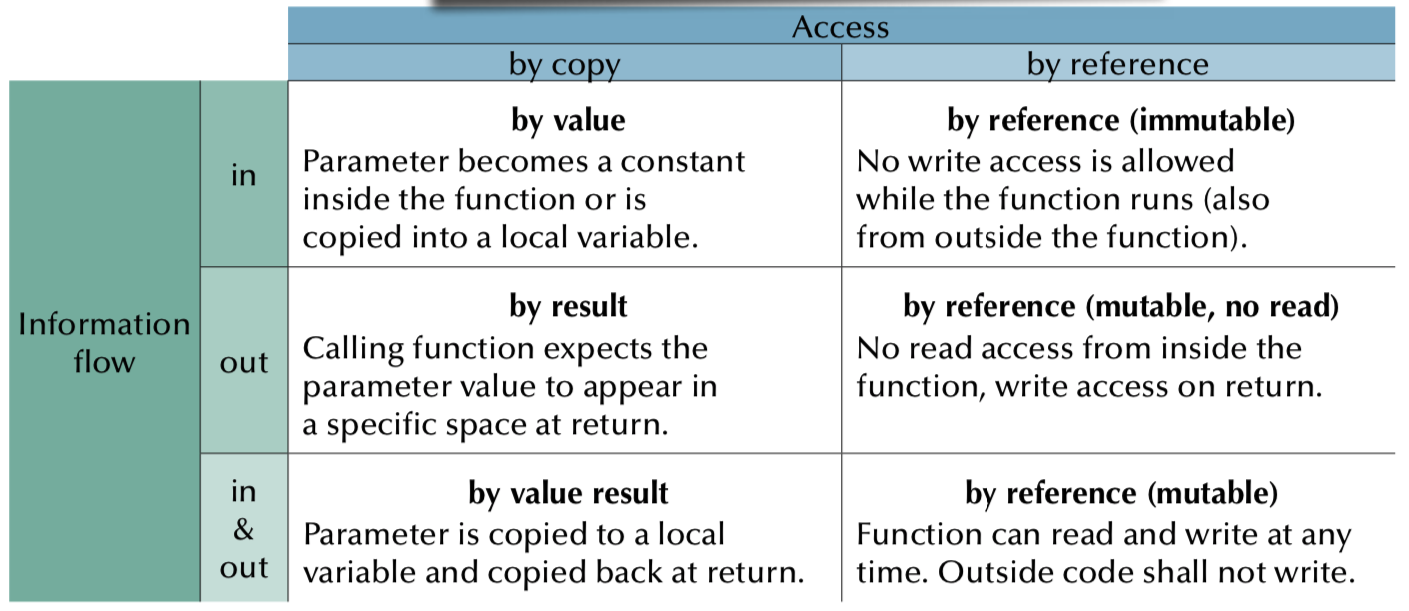
- Passing values: by copy and by reference
there, and back again
AAPCS
The ARMv7 Architecture Procedure Call Standard is the convention we’ll (try to) adhere to in programming our microbits
The full standard is quite detailed, but the general summary is:
-
r0-r3are the parameter and scratch registers -
r0-r1are also the result registers -
r4-r11are callee-save registers -
r12-r15are special registers (ip,sp,lr,pc)
Store and Load to the stack
@ Push the value in r2 onto the stack
str r2, [sp, -4]
sub sp, sp, 4
@ Different one-liners for Push
str r2, [sp, -4]!
push {r2}
stmdb sp!, {r2}
@ Pop the value from the "top" of the stack into r3
ldr r3, [sp]
add sp, sp, 4
@ One-liners for Pop
ldr r3, [sp], 4
pop {r3}
ldmia sp!, {r2}
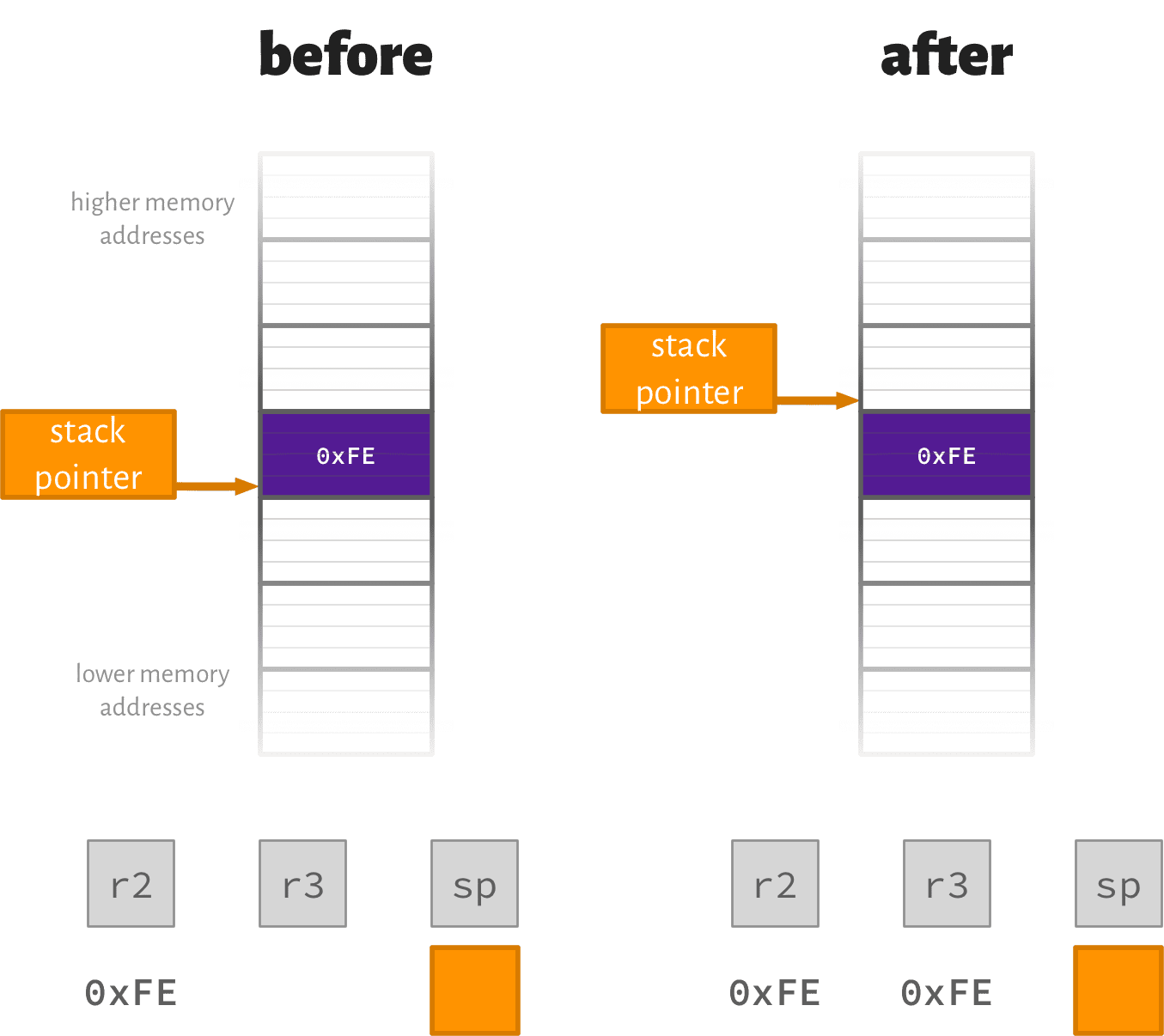
Push and Pop; illustrated
<– Push
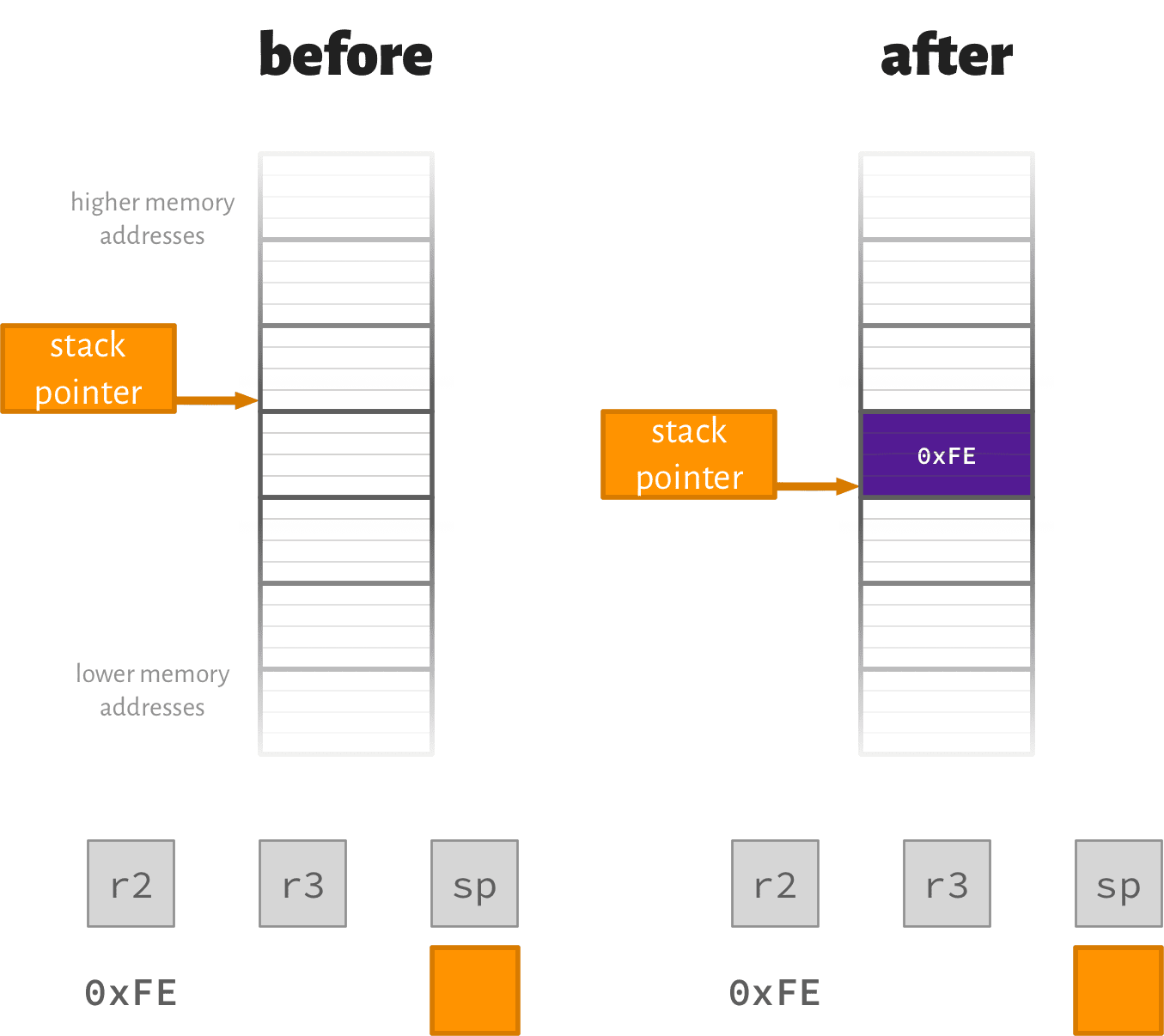
Pop –>
Passing by Copy or Reference
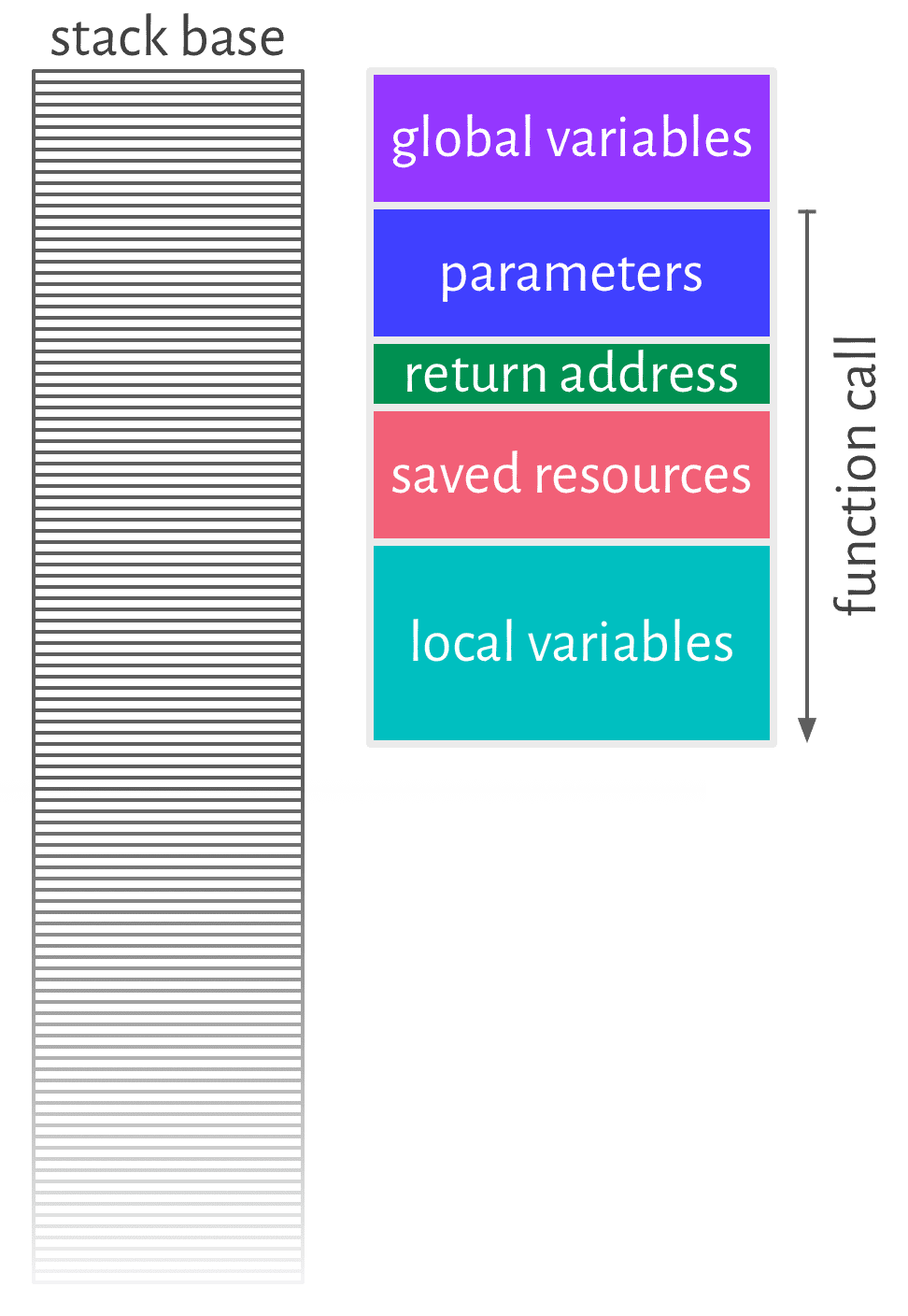
Function stack frame
Recursive Functions: Factorial
fact: @ assume input is in r1
push {lr}
cmp r1, #1
beq base_case
@ recursive case
push {r1}
sub r1, #1
bl fact @ get fact(n-1)
pop {r1}
mul r0, r0, r1 @ calc fact(n-1) * n
b continue_code
base_case:
mov r0, #1
continue_code:
pop {lr}
bx lr
Control Structures
Control Structures Main Topics (in short)
- Conditional branching
- Control Structures in Machine Code:
- if
- while
- for
CPSR table
<c> |
meaning | flags |
|---|---|---|
| eq | equal | Z=1 |
| ne | not equal | Z=0 |
| cs | carry set | C=1 |
| cc | carry clear | C=0 |
| mi | minus/negative | N=1 |
| pl | plus/positive | N=0 |
| vs | overflow set | V=1 |
| vc | overflow clear | V=0 |
| hi | unsigned higher | C=1 ∧ Z=0 |
| ls | unsigned lower or same | C=0 ∨ Z=1 |
| ge | signed greater or equal | N=V |
| lt | signed less | N≠V |
| gt | signed greater | Z=0 ∧ N=V |
| le | signed less or equal | Z=1 ∨ N≠V |
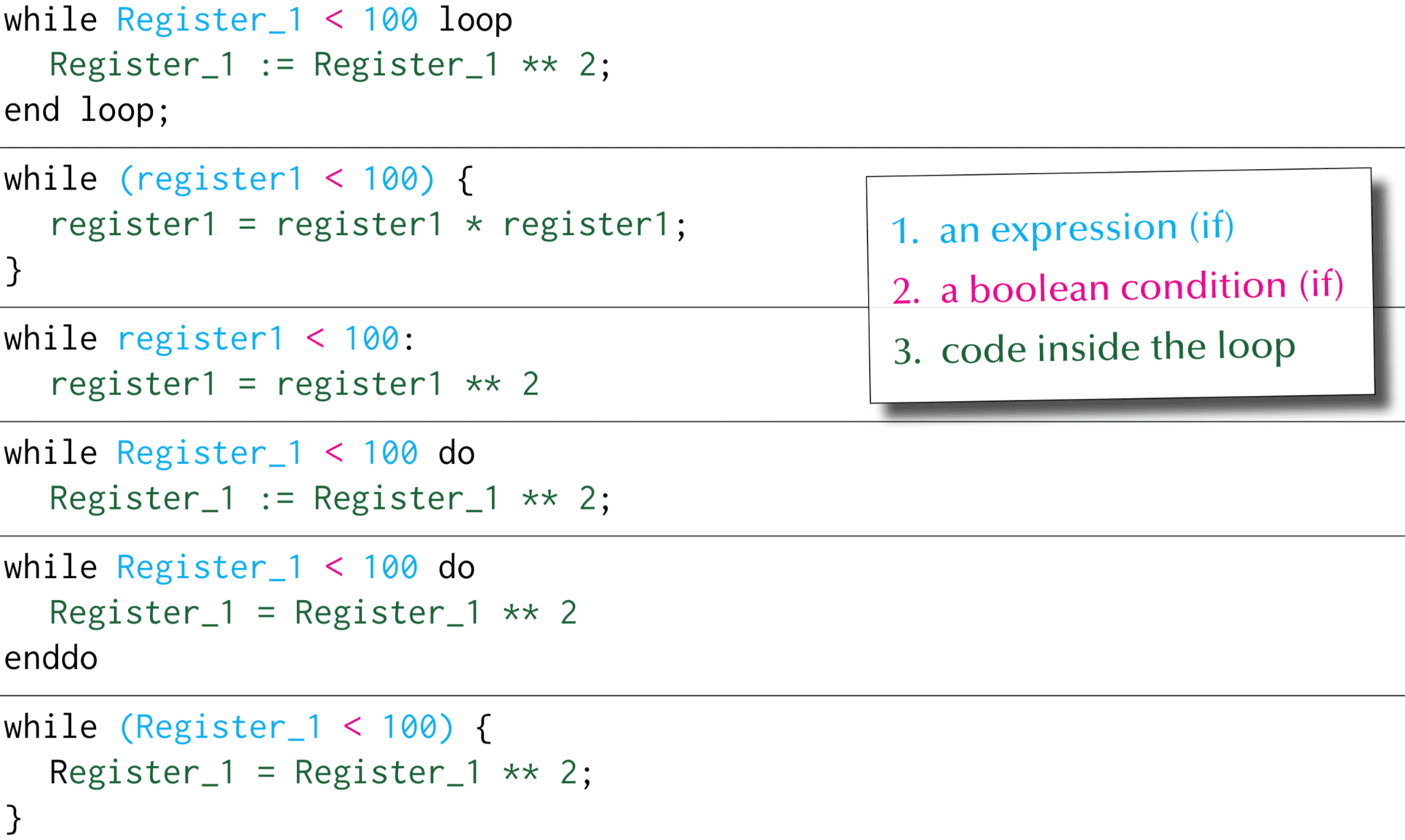
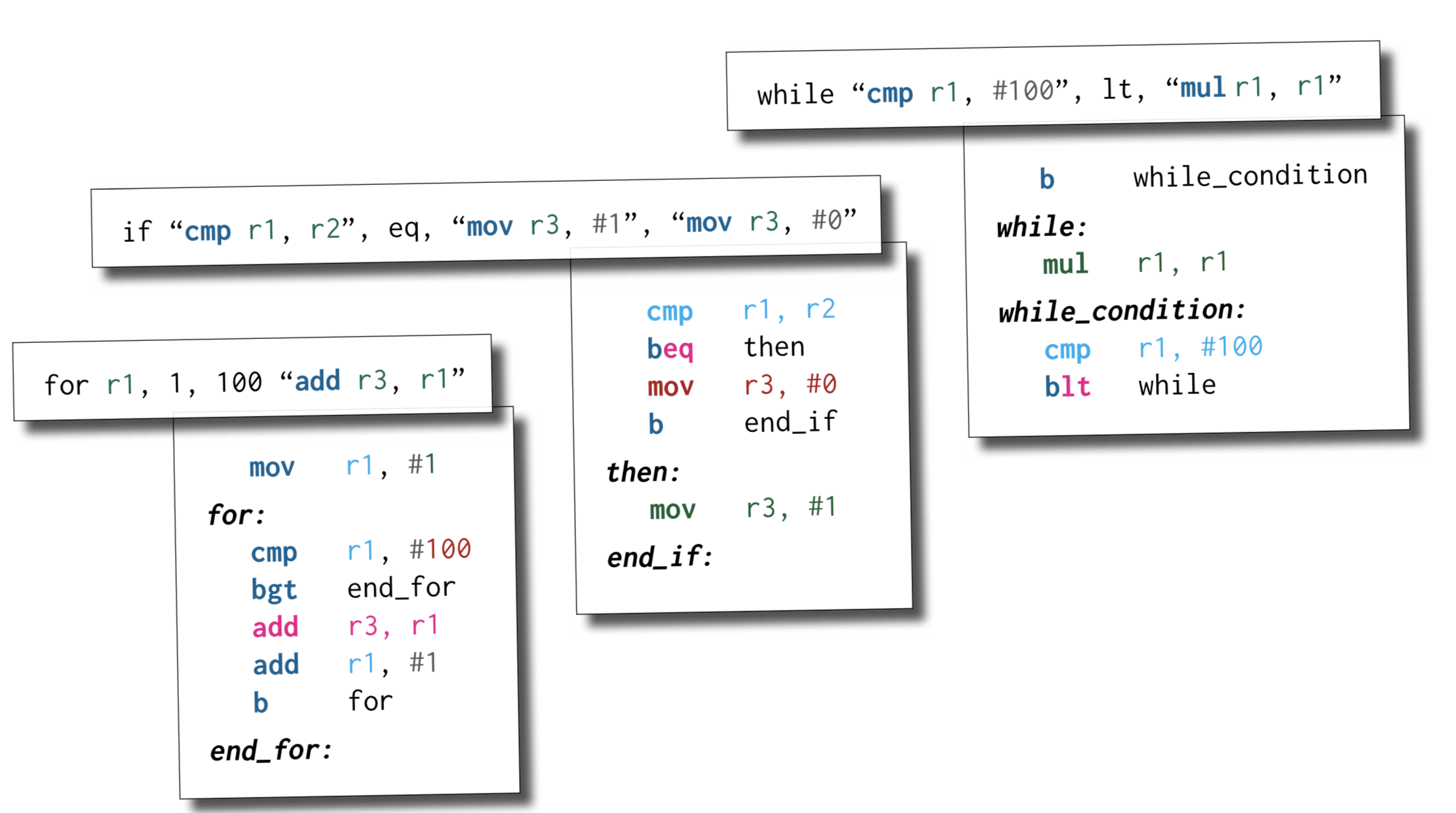
while loop components
control structures gallery - practice these!
talk
Which control structures were useful for your assignments?
Is there anything you can do in assembly that goes beyond “typical control structures”?
Data Structures
Data Structures Main Topics (in short)
- Arrays
- Structure
- Alignment
- Addressing
- Iterators
- Copying
talk
How do we know how big an array is in memory?
Is it possible to write outside the bounds of the array?
Can you make an array where the size can be changed? (mutable array?)
How do we address a particular element in an array?
Add up the numbers in an array
ldr r0, =array @ base address
mov r1, 0 @ from_index
mov r2, 7 @ to_index
@ setup
mov r3, 0 @ "accumulator" register
mov r4, 4 @ element size
array_sum:
mul r5, r1, r4 @ calculate offset
ldr r6, [r0, r5] @ load from offset
add r3, r6 @ update accumulator
add r1, 1 @ increment index
cmp r1, r2 @ keep looping?
ble array_sum
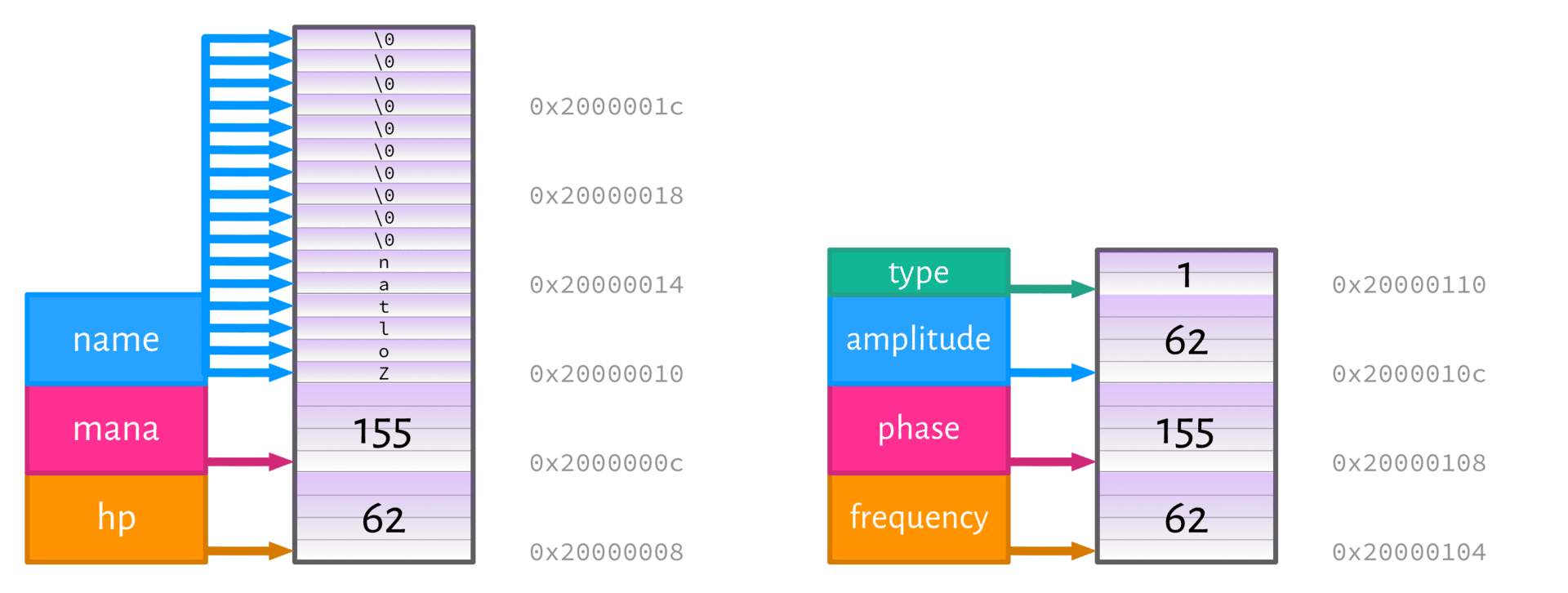
Records
talk
What’s the difference between an array and a record?
Imagine you are creating a Point-of-Sale system (cash register) using a microbit. What data structures might be required?
Asynchronism, Interrupts, and Concurrency
Async Main Topics (in short)
- Interrupts & Exceptions: When and Why?
- What happens during an interrupt?
- How is this related to parallel computing?
- Concurrency and Synchronisation
- Race Conditions
- Mutual Exclusion
- Synchronisation (Locks and Semaphores)
talk
What’s an interrupt? Why are they necessary?
Interrupts
One or multiple lines wired directly to the sequencer.
Interrupts: Enables pre-emptive scheduling, timer driven actions, transient hardware interactions, etc…
BUT: A little bit more work to set up, requires external hardware (“interrupt controller”) to encode external requests.
Interrupt Handler
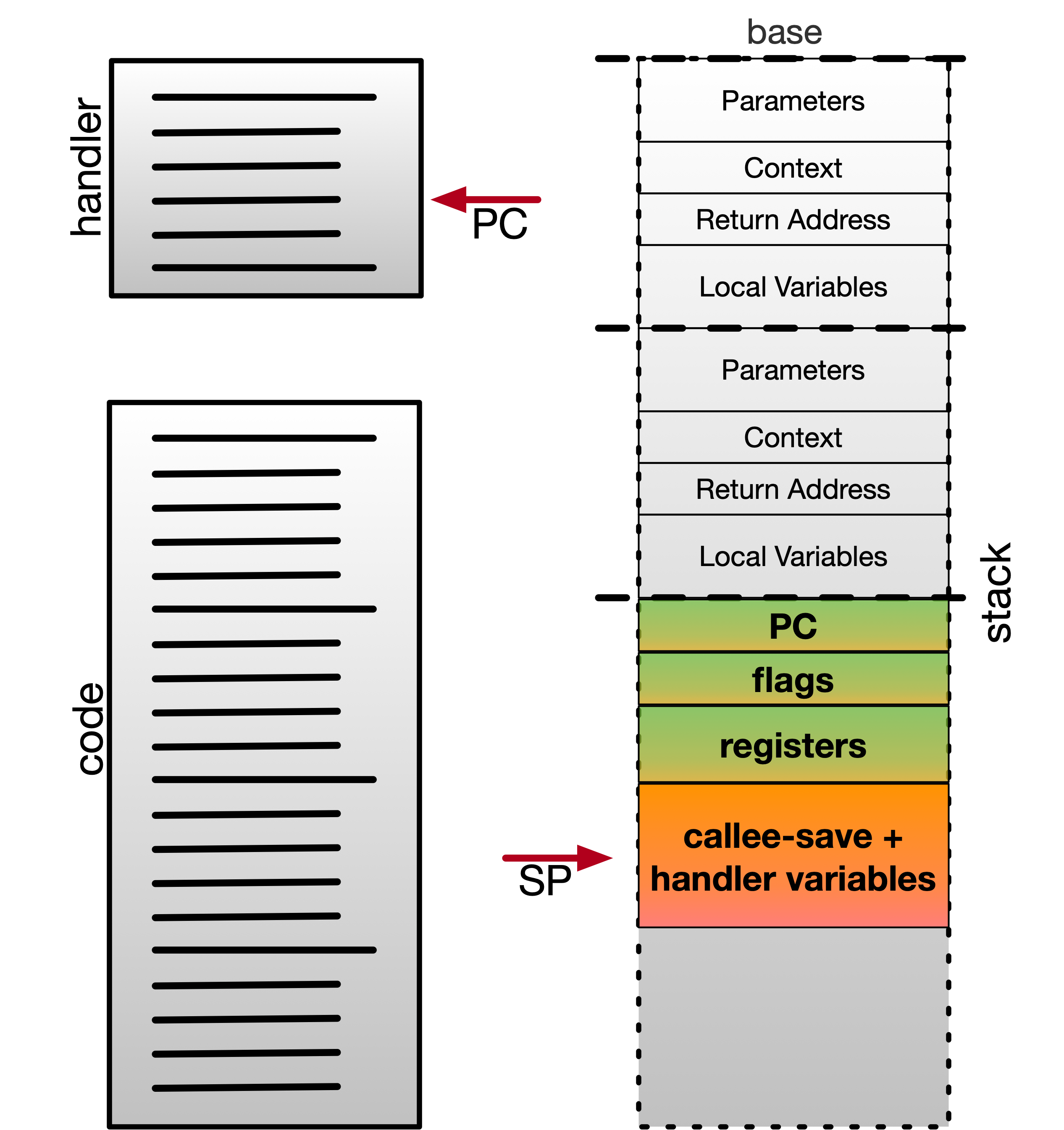
A “normal function”, called when an interrupt is triggered.
The CPU saves the “caller-save” context on the stack, loads lr with special value.
Handler saves “callee-save” context, then runs I/O or time-critical code.
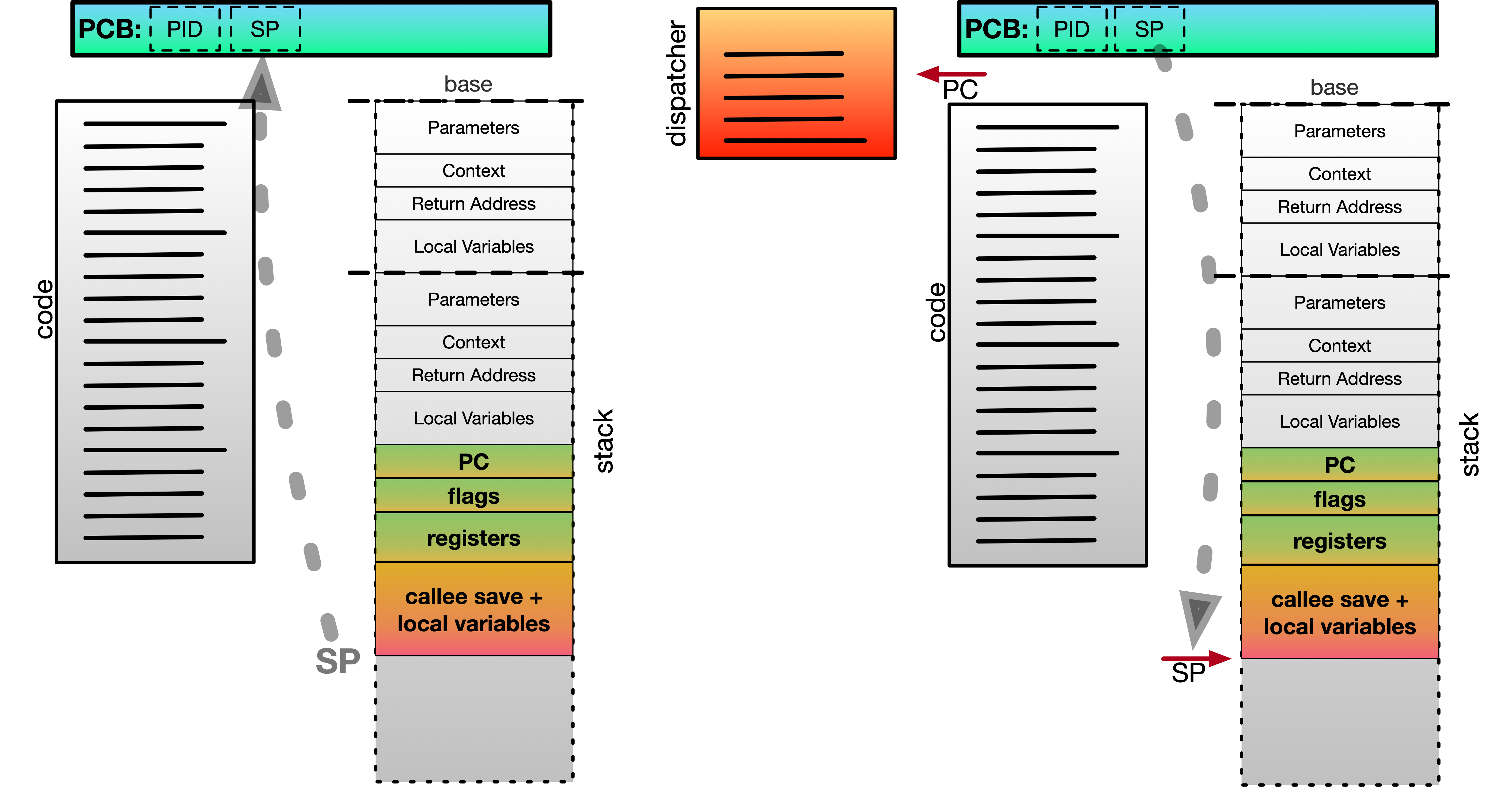
Context Switch
Switch out a program (during an interrupt) without it even noticing!
talk
What’s problems can occur when running concurrent programs? What are the possible solutions?
How does the “too much milk” problem help us understand this issue?
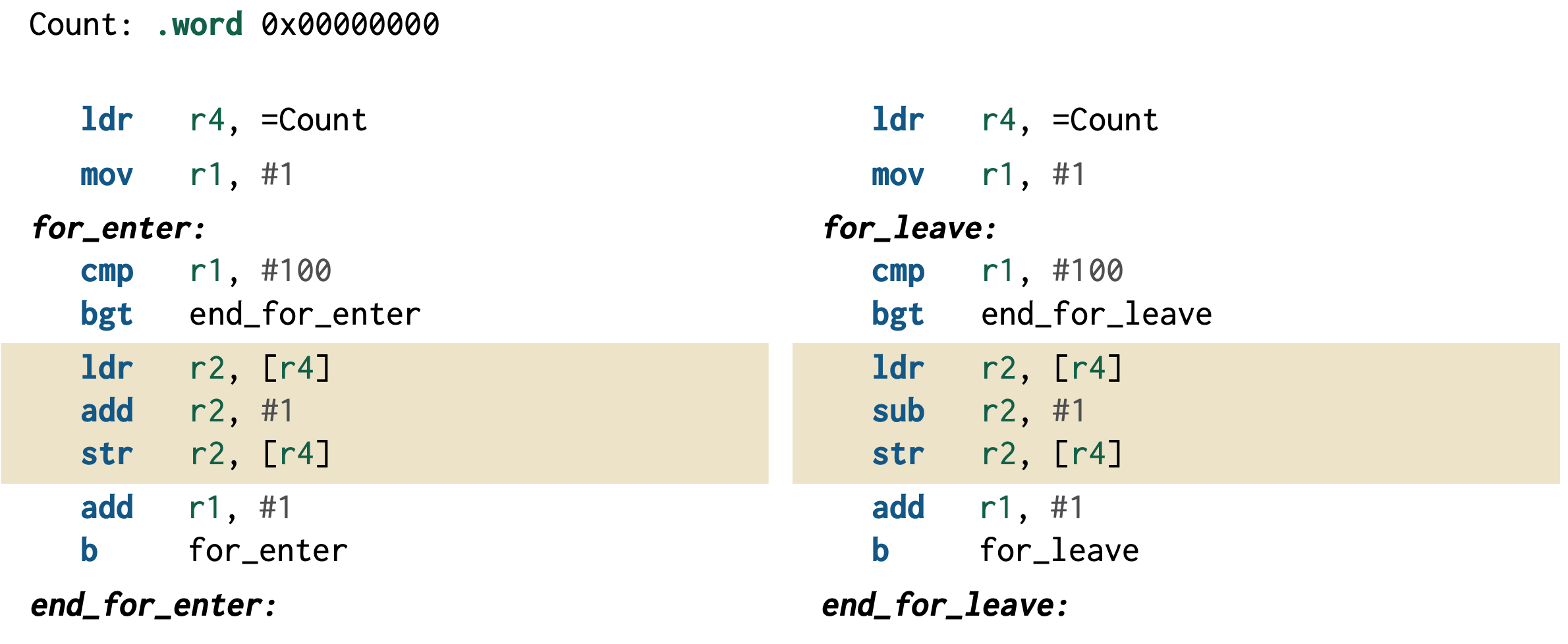
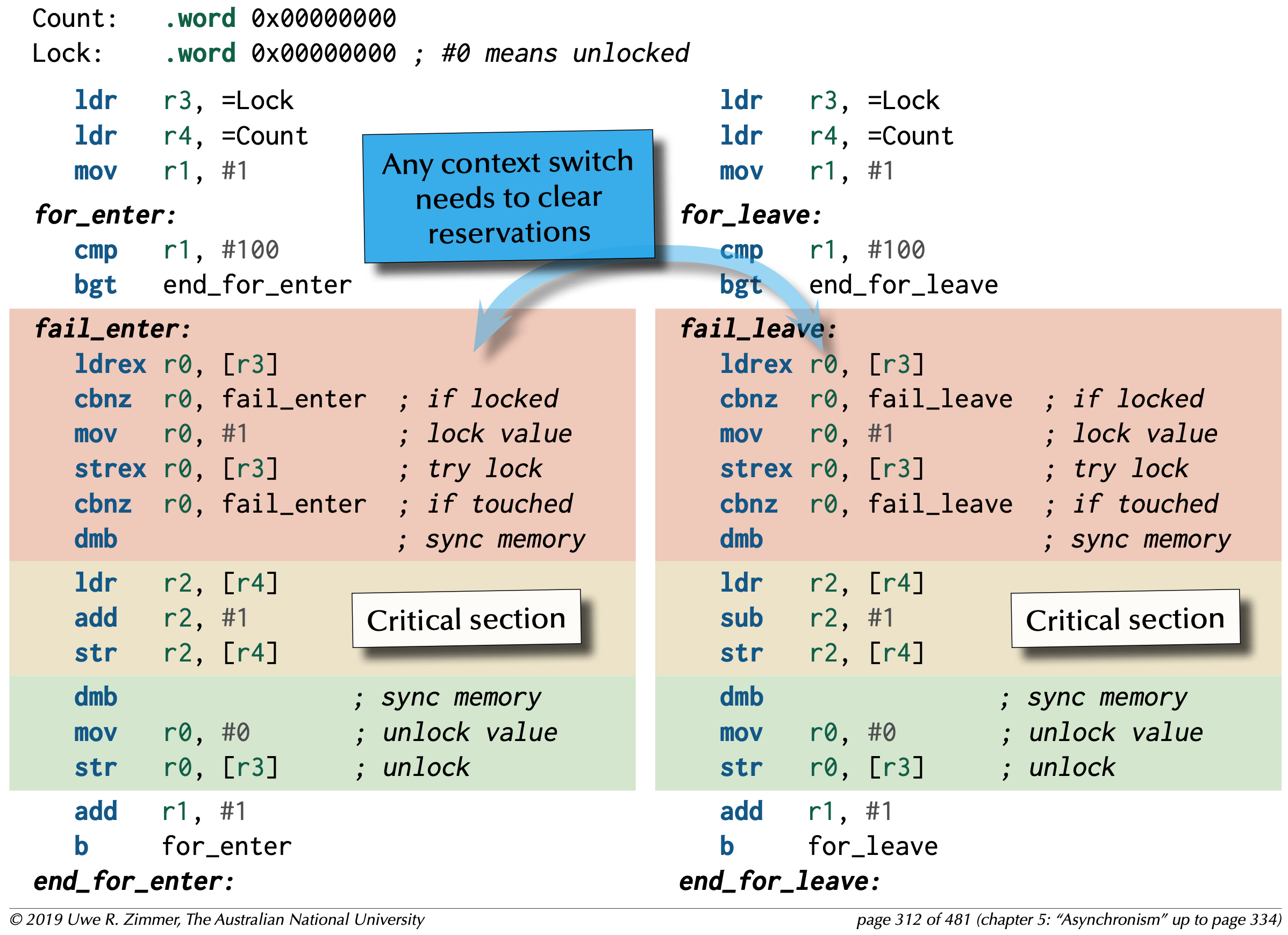
Race Conditions and Mutual Exclusion
When the sequence or timing of threads of execution has an effect on the outcome.
Can result in bugs! (e.g., in Assignment 3!) What is the value at Count in this code?
Critical Section
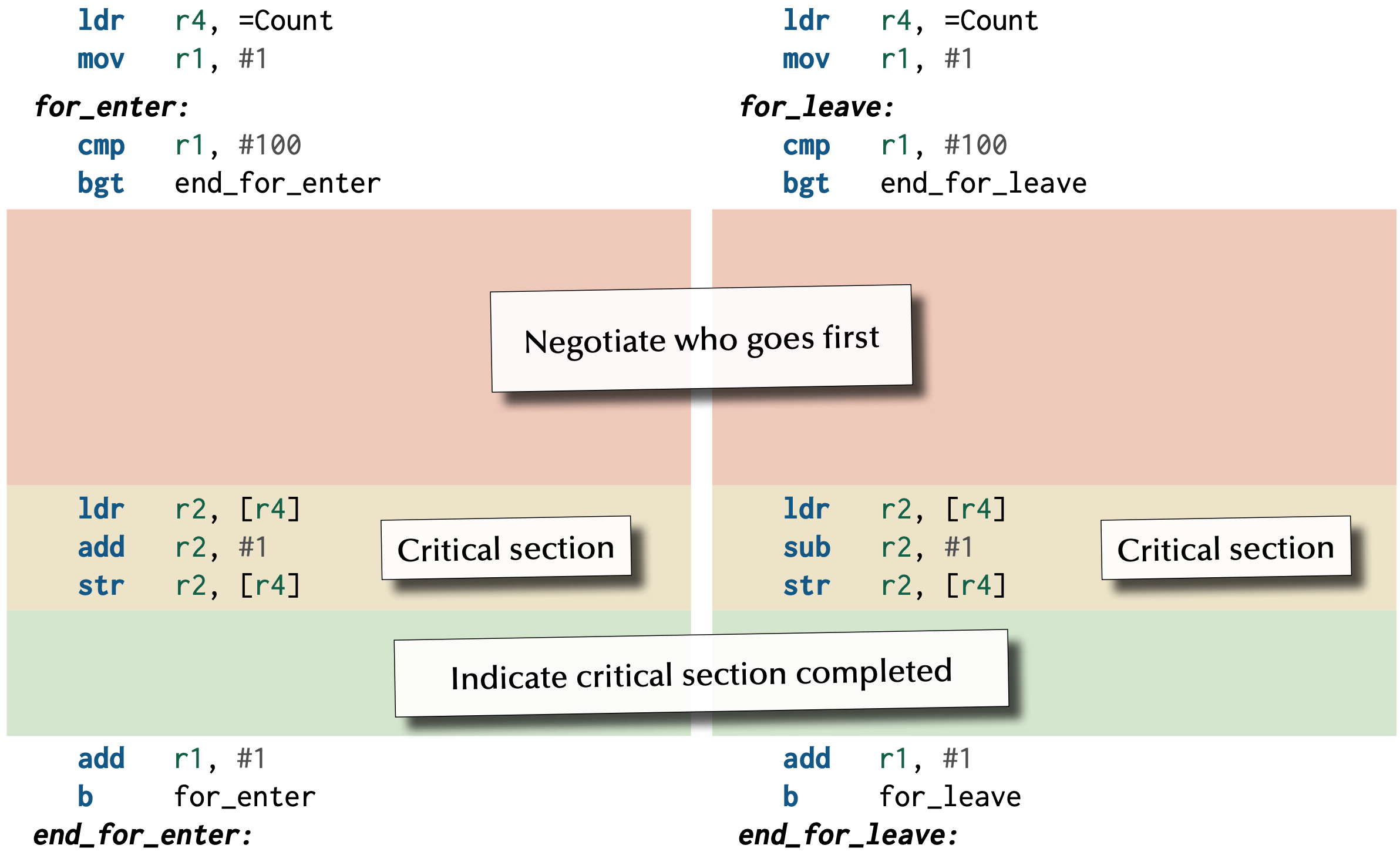
What does ARMv7-M give us?
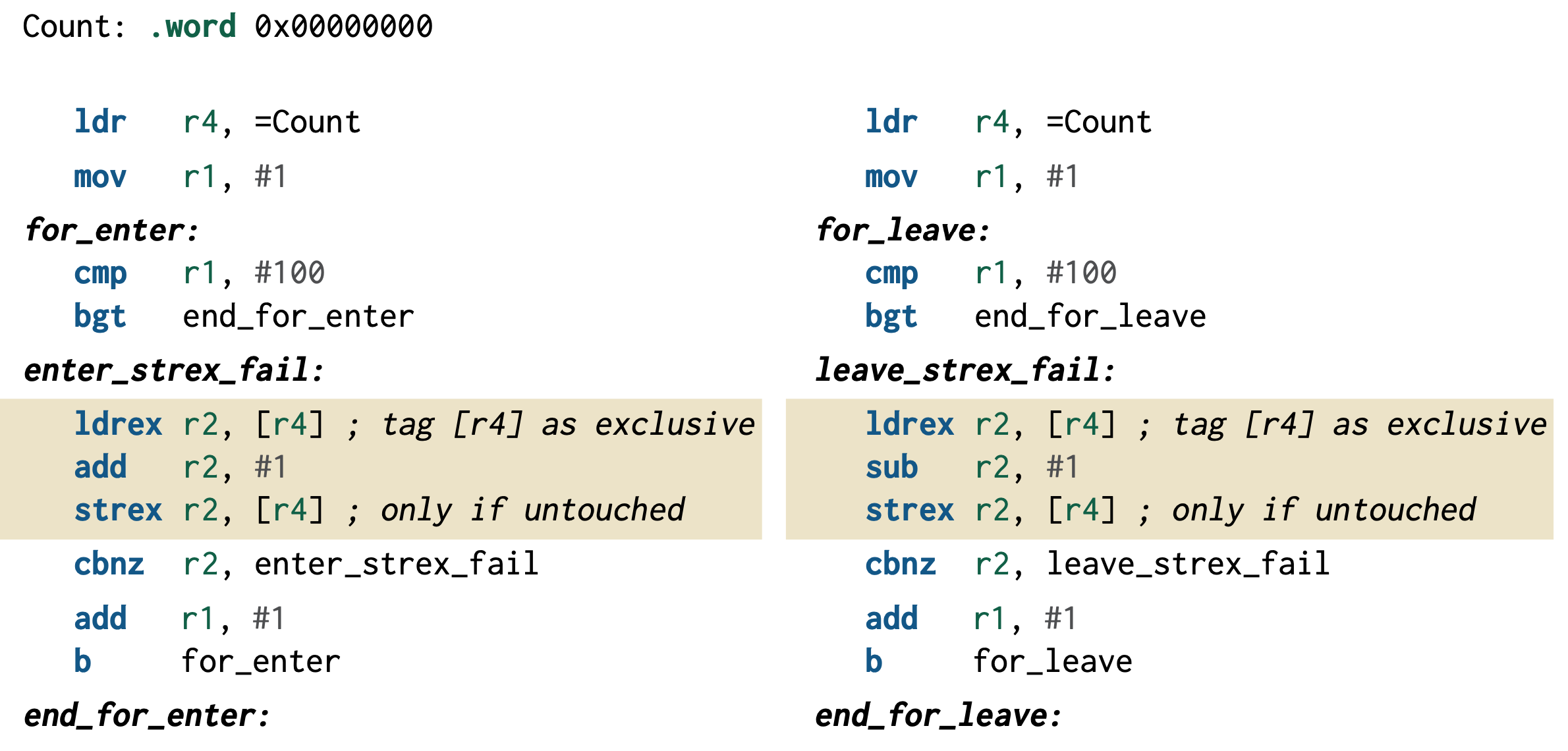
Using a “lock” variable
talk
What’s mutual exclusion?
Can this be achieved on a microbit?
How would you do it?
Networks
Networks Main Topics (in short)
- Transmission mediums
- Communications protocols
- Packet switched/circuit switched
- Simplex/duplex
- Topology
- Parallel/Serial
- Timing and Synchronisation
- OSI reference model (7-layers!)
talk
How many transmission mediums can you name?
If you were stuck on a desert island what transmission media could you use to send a message for help?
What is a communications protocol?
Why would it be needed?
Explain your answer.
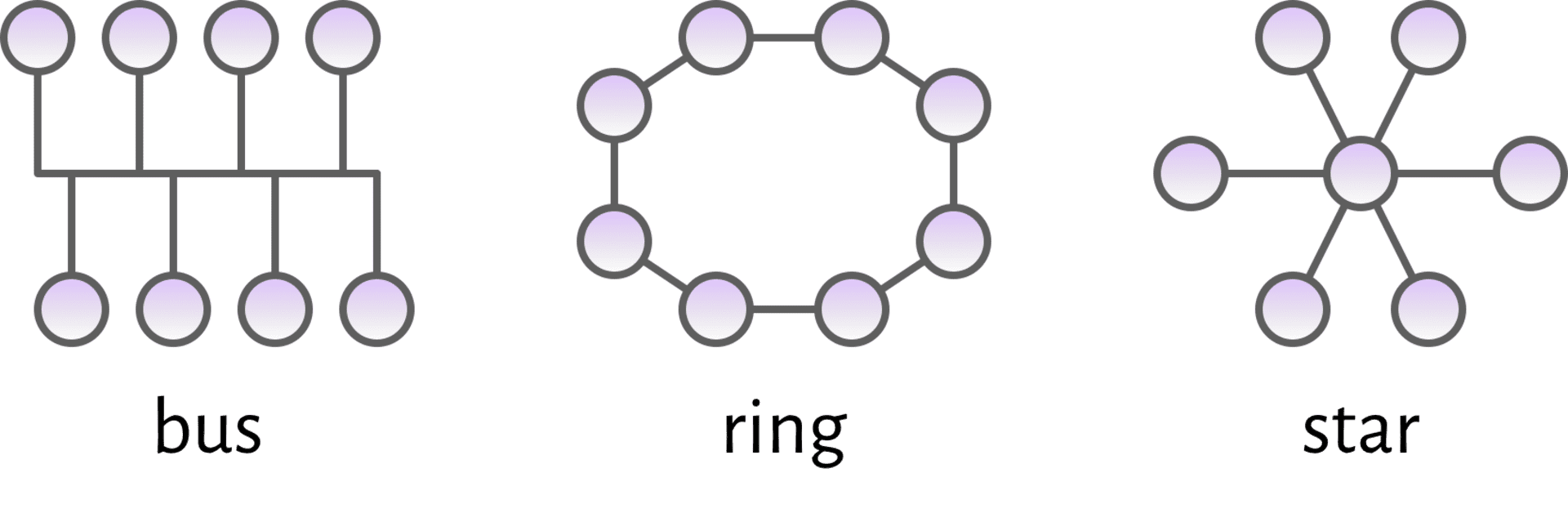
Topology
topology is the way that the nodes are connected to one another (both physically and logically)
there are several different ways to connect the nodes together, each with pros and cons
Serial vs parallel
| serial | parallel |
|---|---|
| data is sent one-bit-at-a-time | multiple bits sent simultaneously (e.g. multiple wires) |
| fewer bits sent per signal, but simpler | need to keep all the connections in sync |

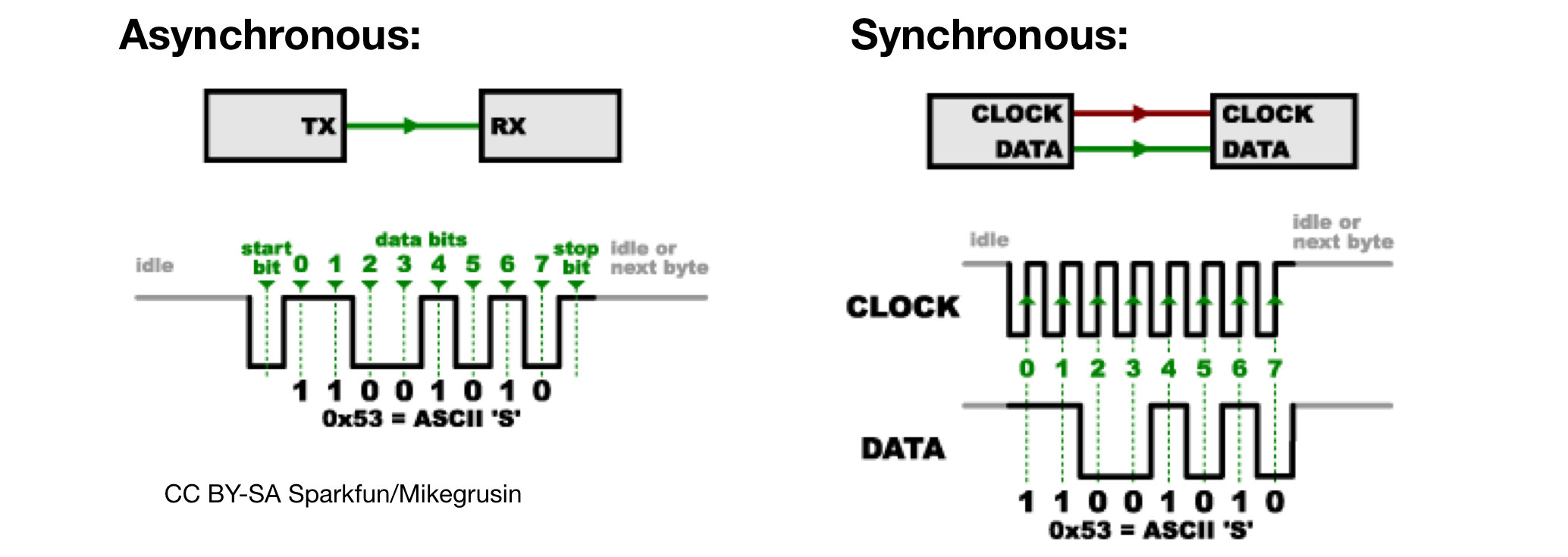
Synchronous vs Asynchronous
| synchronous | asynchronous |
|---|---|
| transitions on a clock line | (independent) timers at each end |
| no clock skew issues, but requires an extra connection | no extra connections required, but more vulnerable to synchronisation issues |
Operating Systems
OS Main Topics (in short)
- Operating Systems: Concept
- OS Categories
- OS Architectures
- Processes - what are processes anyway?
- How do OSs handle processes?
- Scheduling
Why do we need operating systems anyway?
What’s an OS? …two main roles
| virtual machine | resource manager |
|---|---|
| provides friendly & safe environment | coordinates access to resources |
| memory management | processors |
| hardware abstraction | memory |
| process management | mass storage |
| inter-process comms (IPC) | communications channels |
| devices (timers, GPUs, DSPs, peripherals…) |
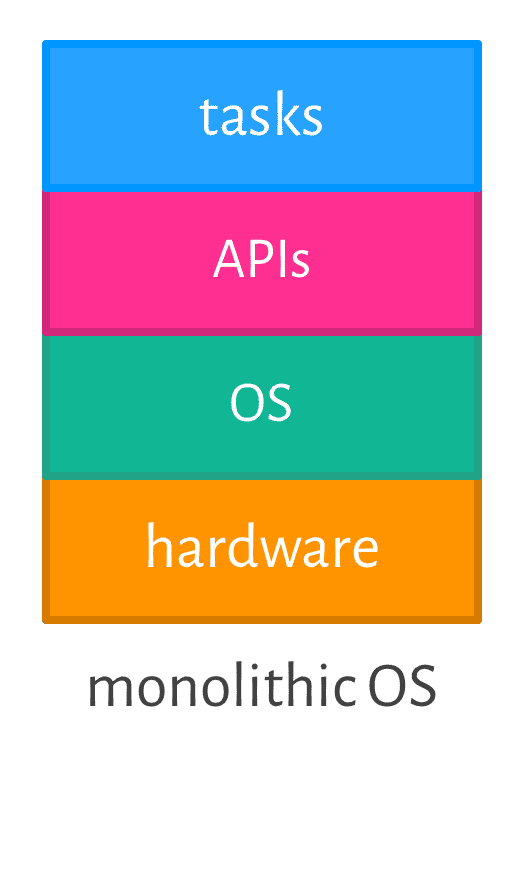
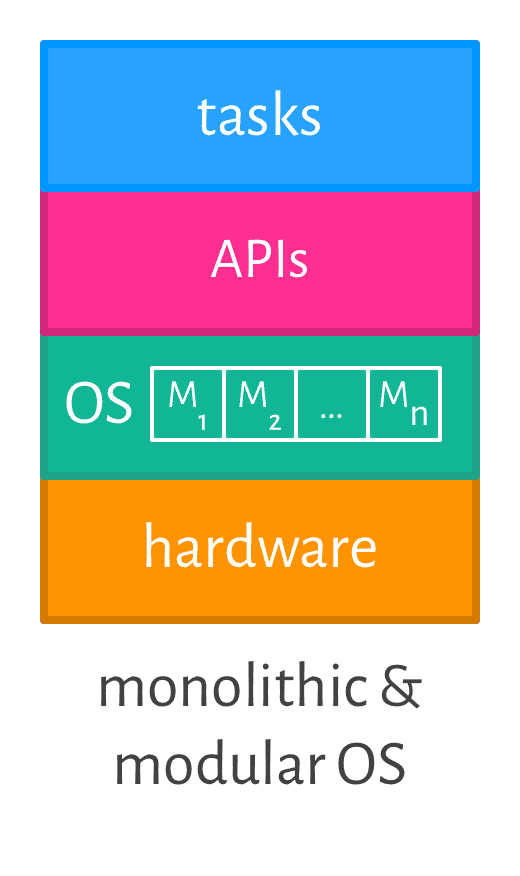
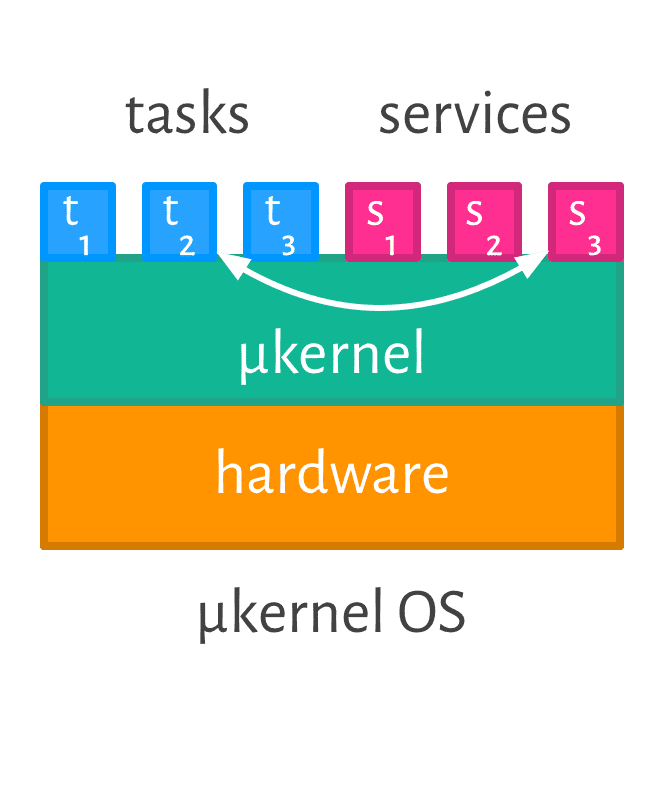
Kernel: definition
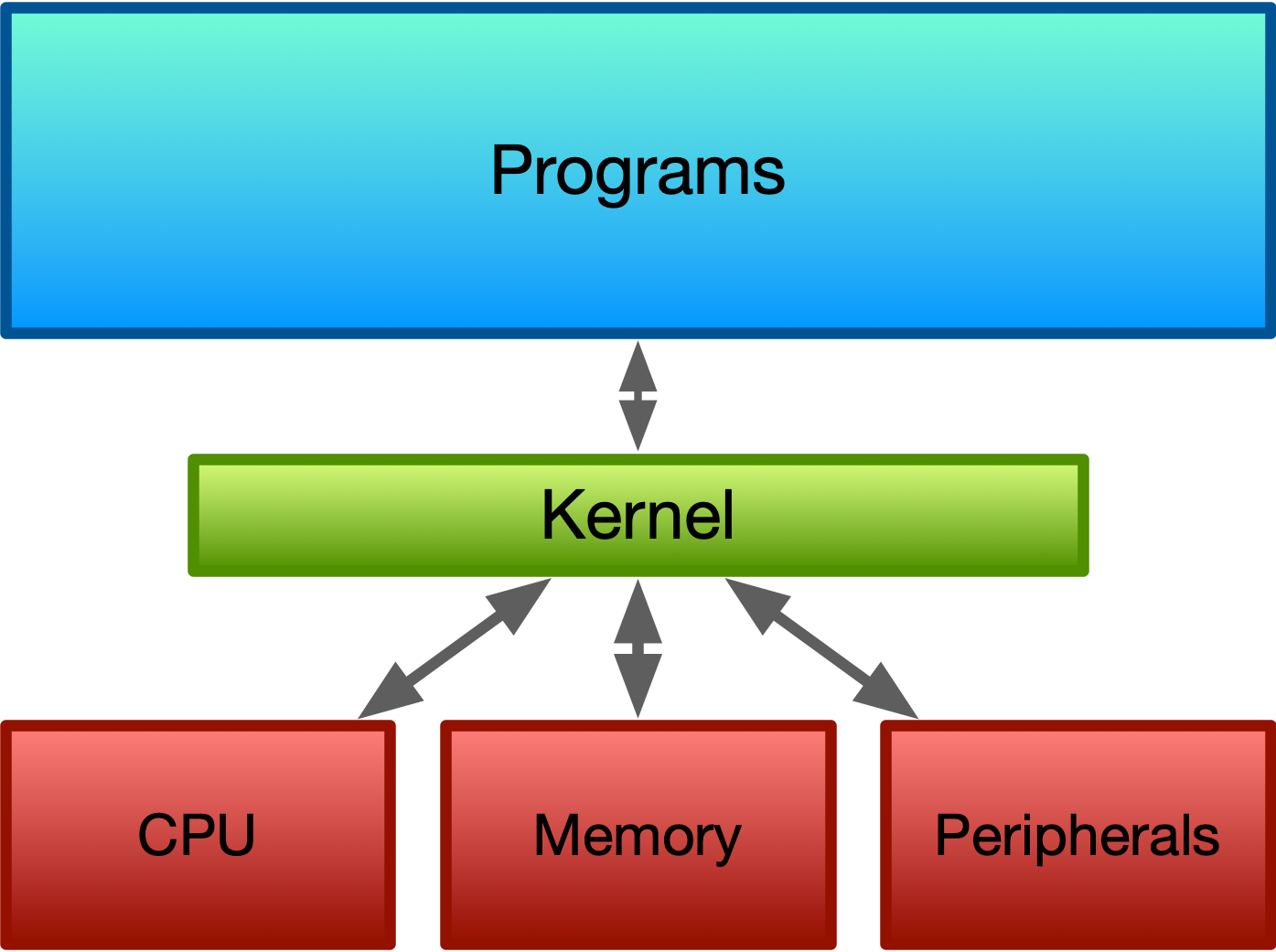
the kernel is the program (functions, data structures in memory, etc.) which performs the core role(s) of the OS
access to the CPU, memory, peripherals all happens through the kernel through a system call
Monolithic OS - Modular - μKernels
talk
Why are kernels and (user) programs separate?
How are they different?
Aren’t they both programs?
Process: definition
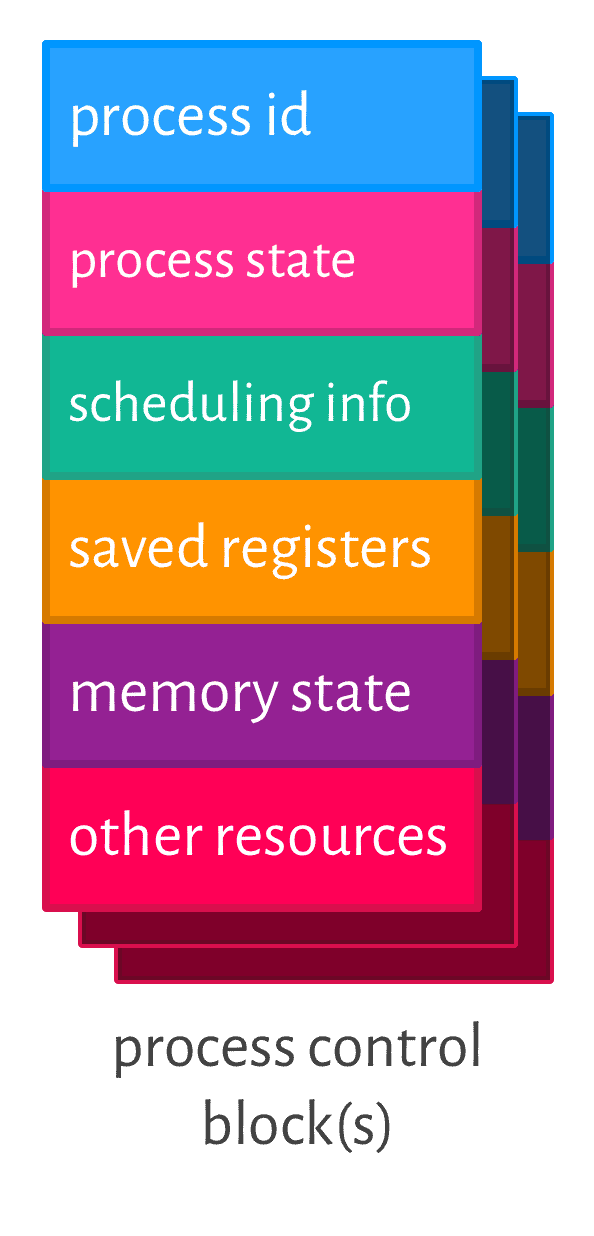
- a running program
- includes the code (instructions) for the program, and the current state/context:
- registers/flags
- memory (stack and heap)
- permissions/privileges
- other resources (e.g. global variables, open files & network connections, address space mappings)
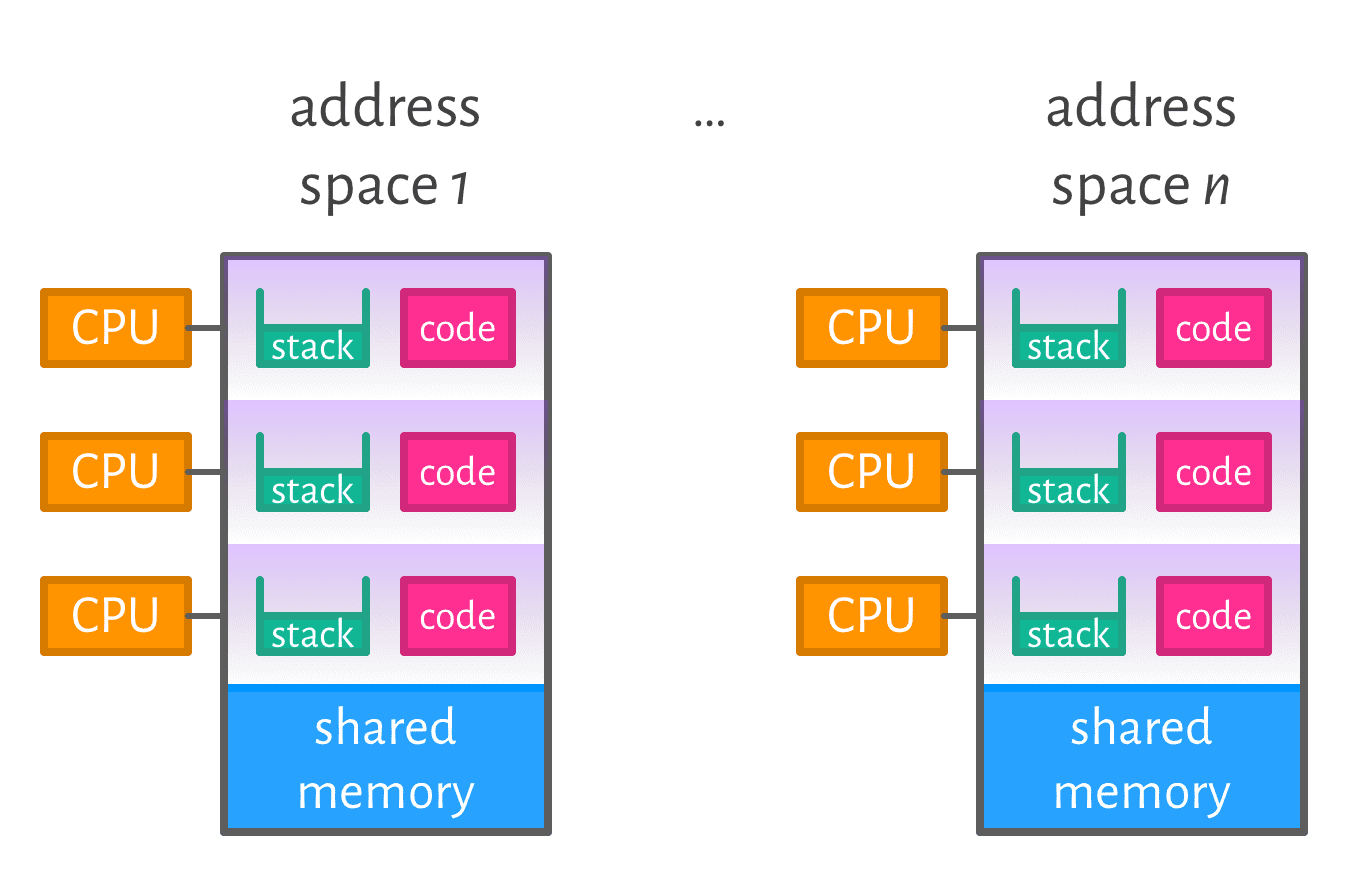
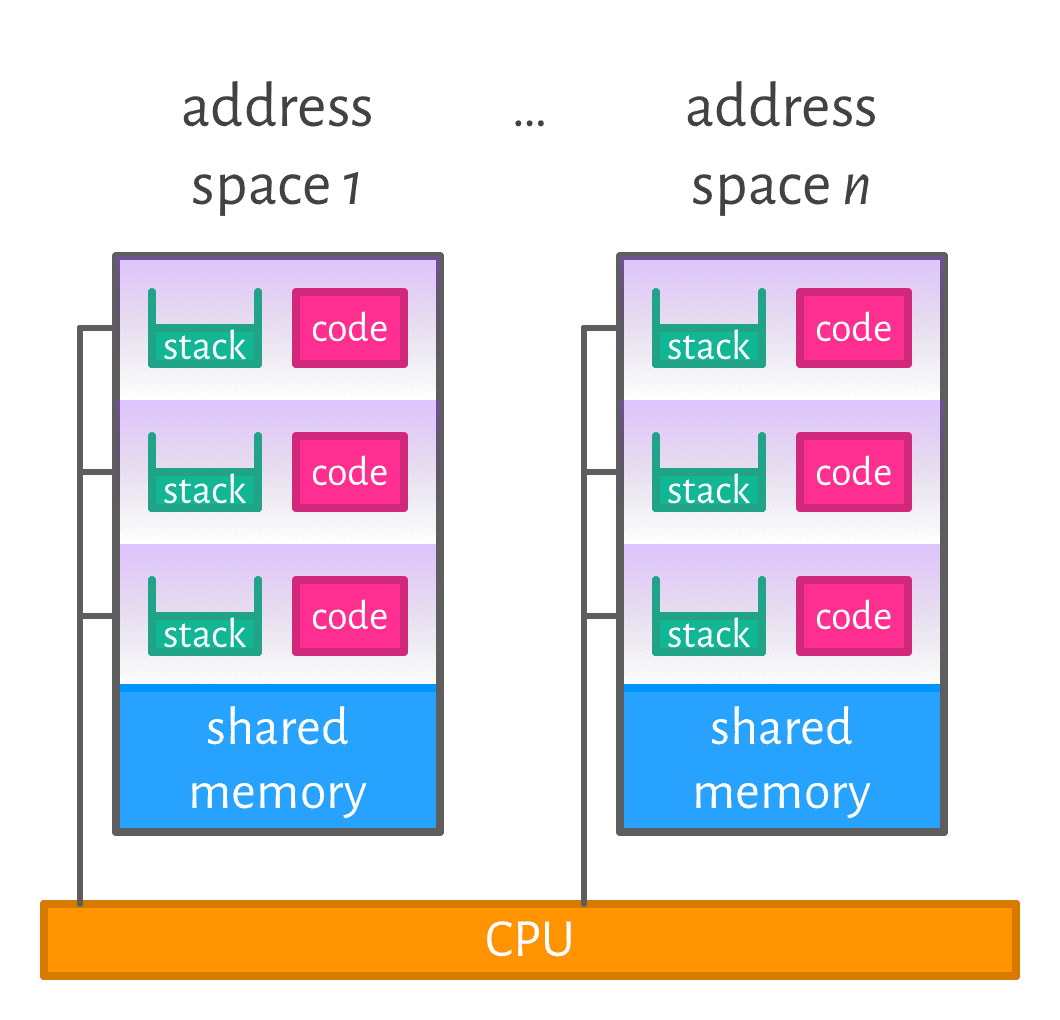
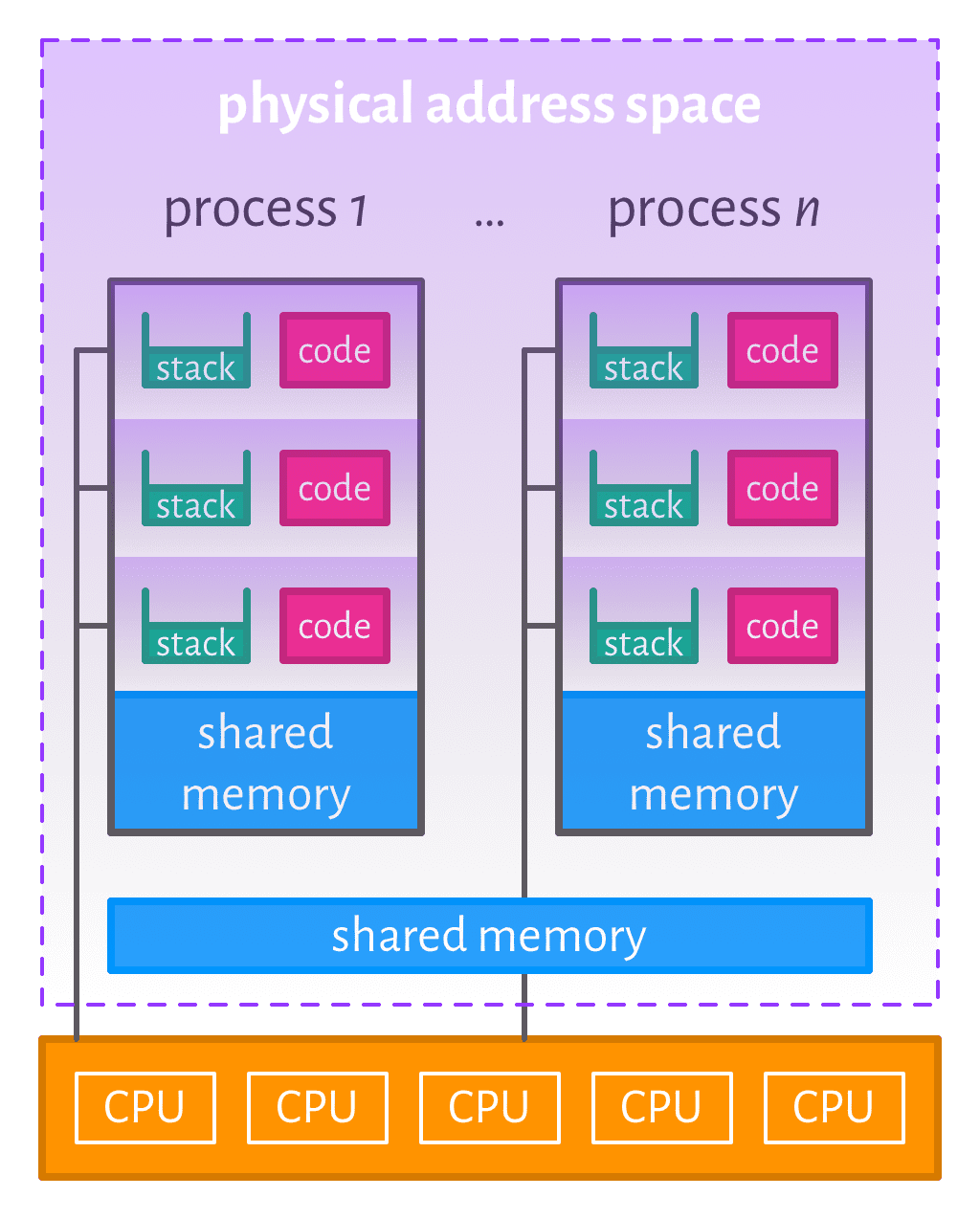
Mapping processes to CPUs
Architecture
Architecture Main Topics (in short)
- History of computing architectures
- Harvard vs von Neumann architecture
- Pipelines
- Out-of-order execution
- Vector/SIMD instructions
- Hyper-threading
- Multi-core computing
- Virtual Memory
- Alternative architectures (Parallax Propeller)
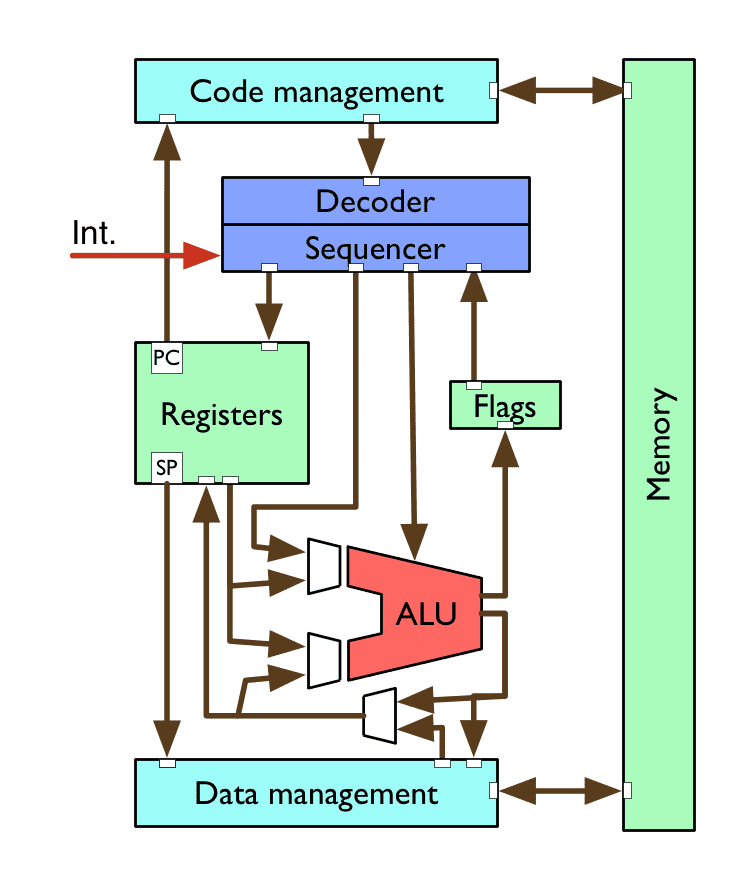
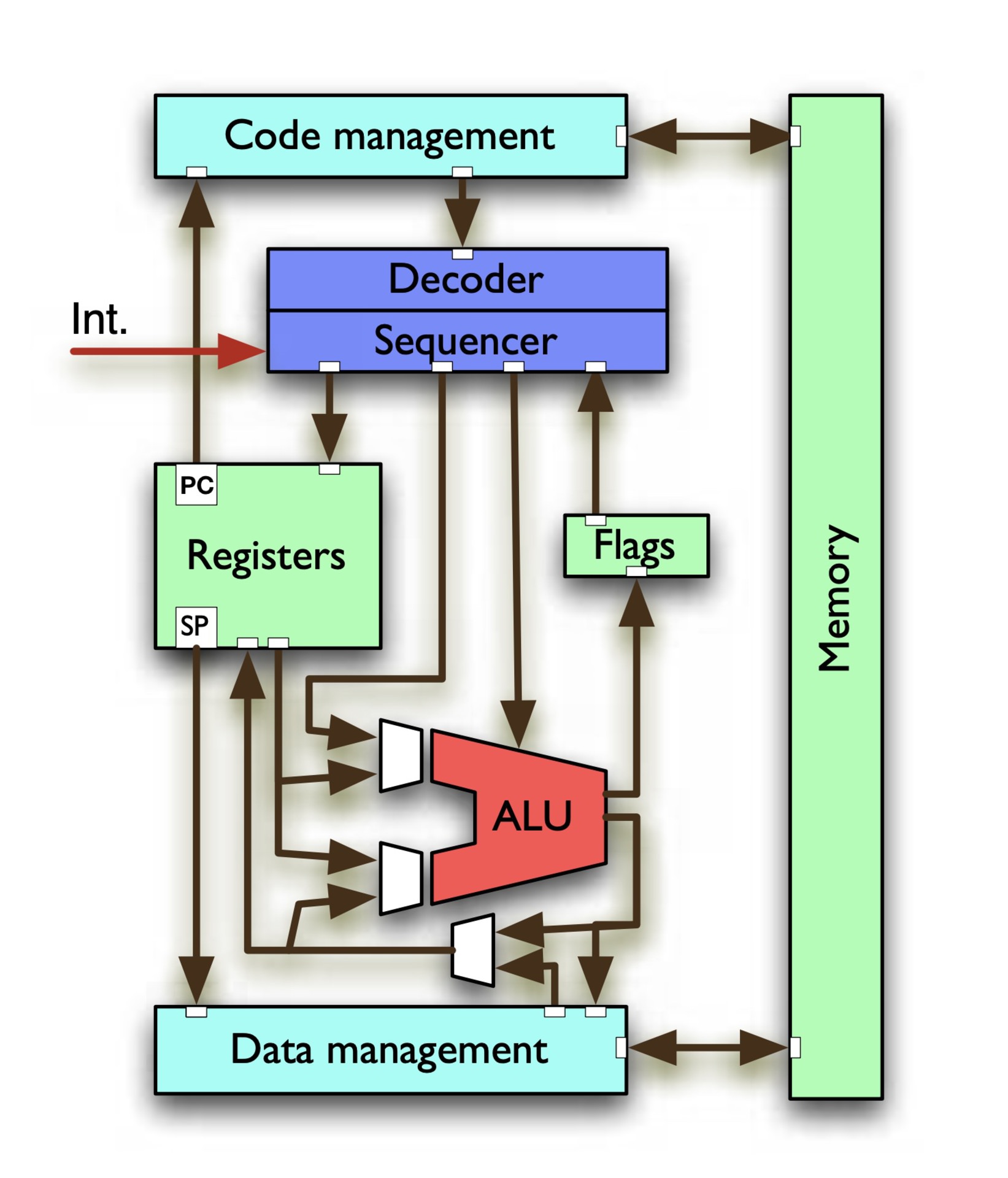
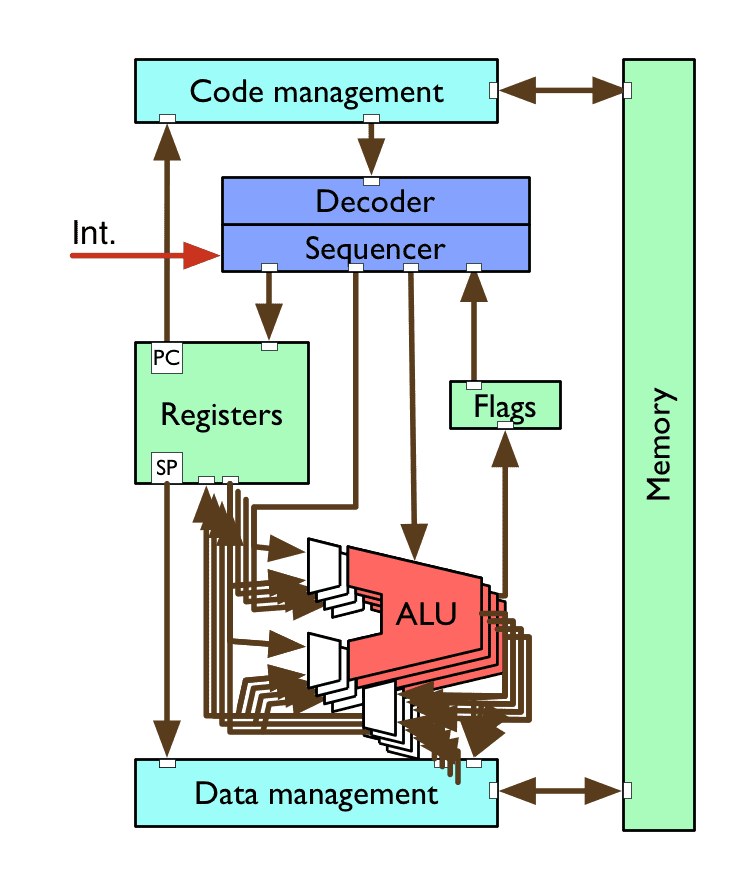
A simple CPU
- decoder/sequencer converts instructions into CPU control signals
- arithmetic logic unit (ALU) performs maths & logic operations
- registers provide small, fast storage to the CPU
- flags indicate the states of the latest calculations
- code/data management for loading/storing, caching
- memory
Are any of these components unneccessary?
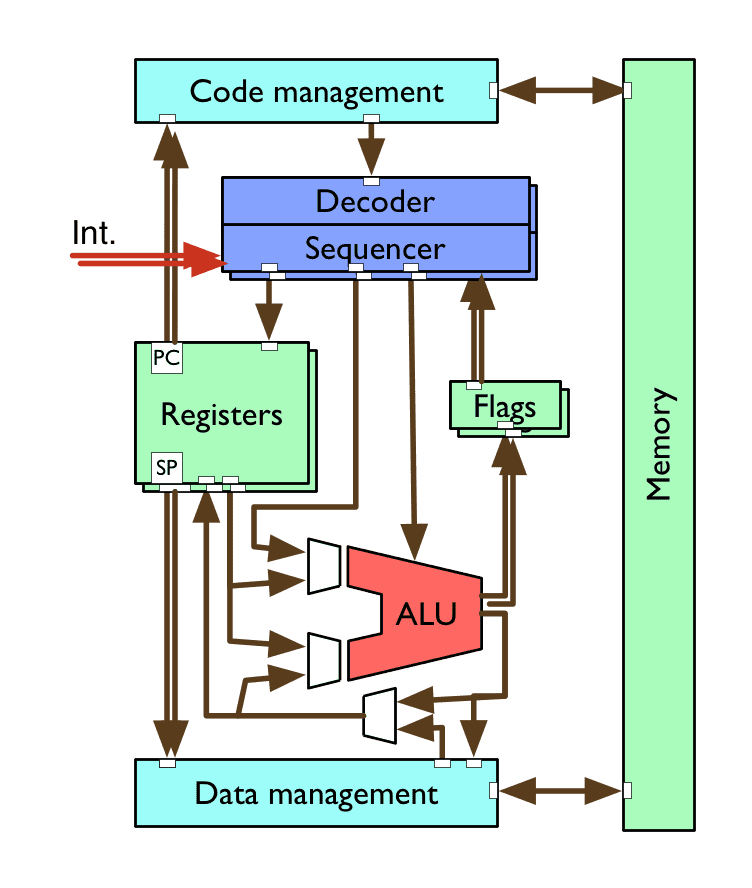
Simple Pipeline
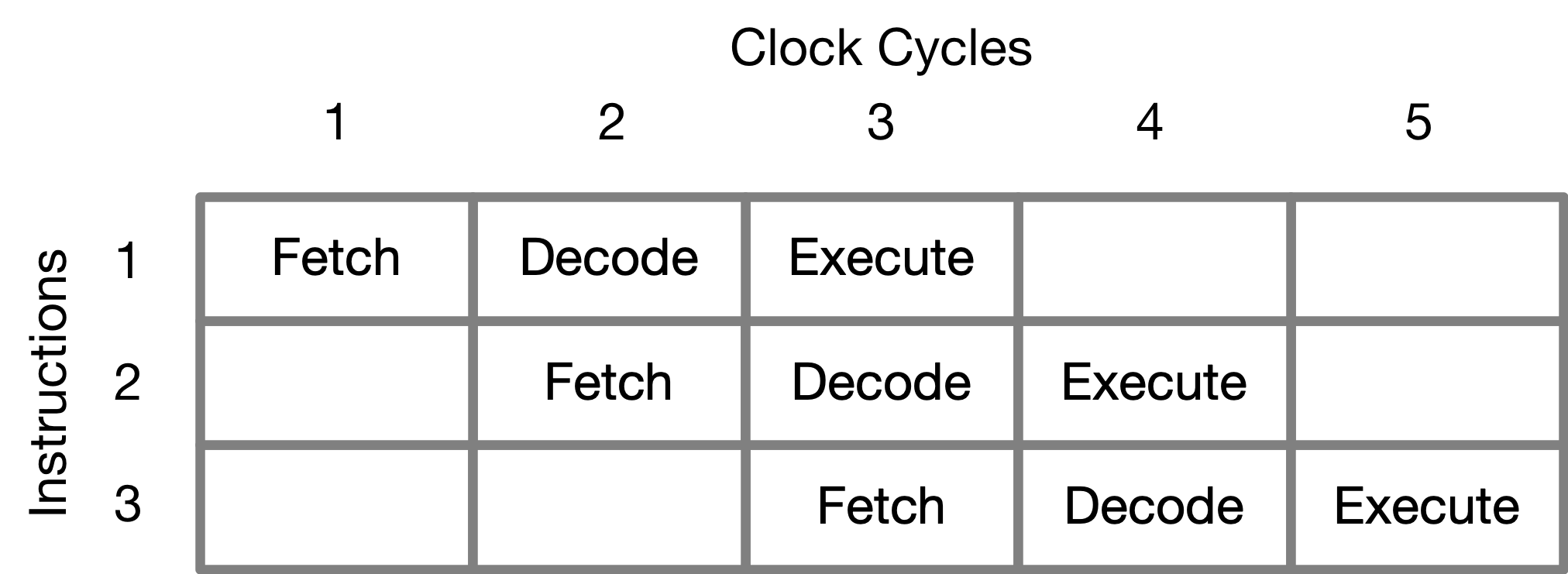
What can go wrong in a pipeline?
Vector/SIMD vs hyper-threading vs multi-core
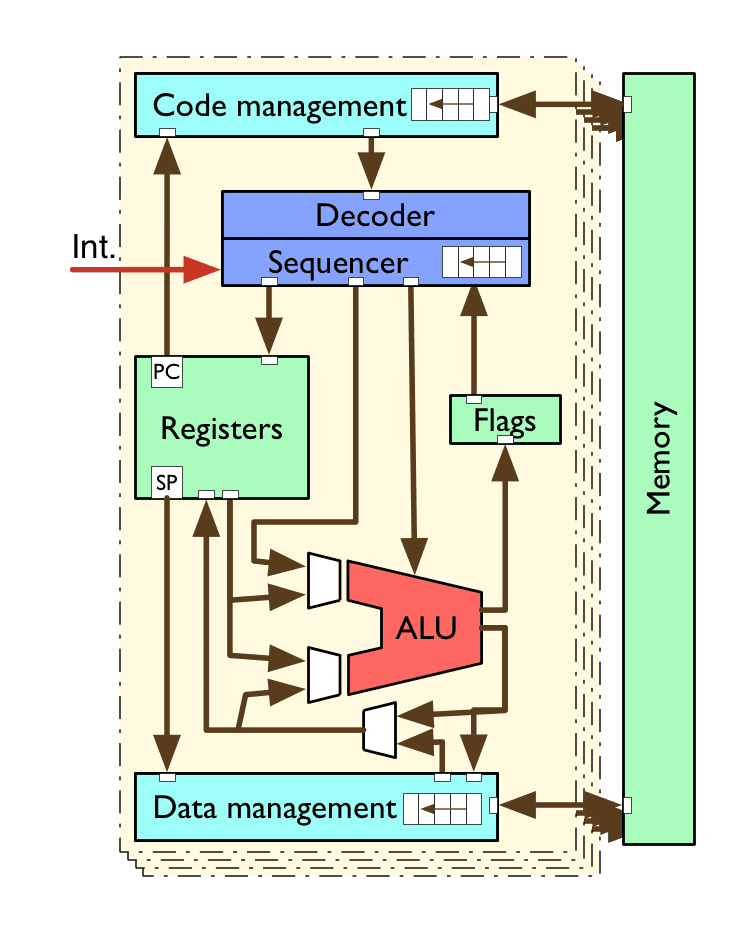
What are the differences?
Virtual Memory
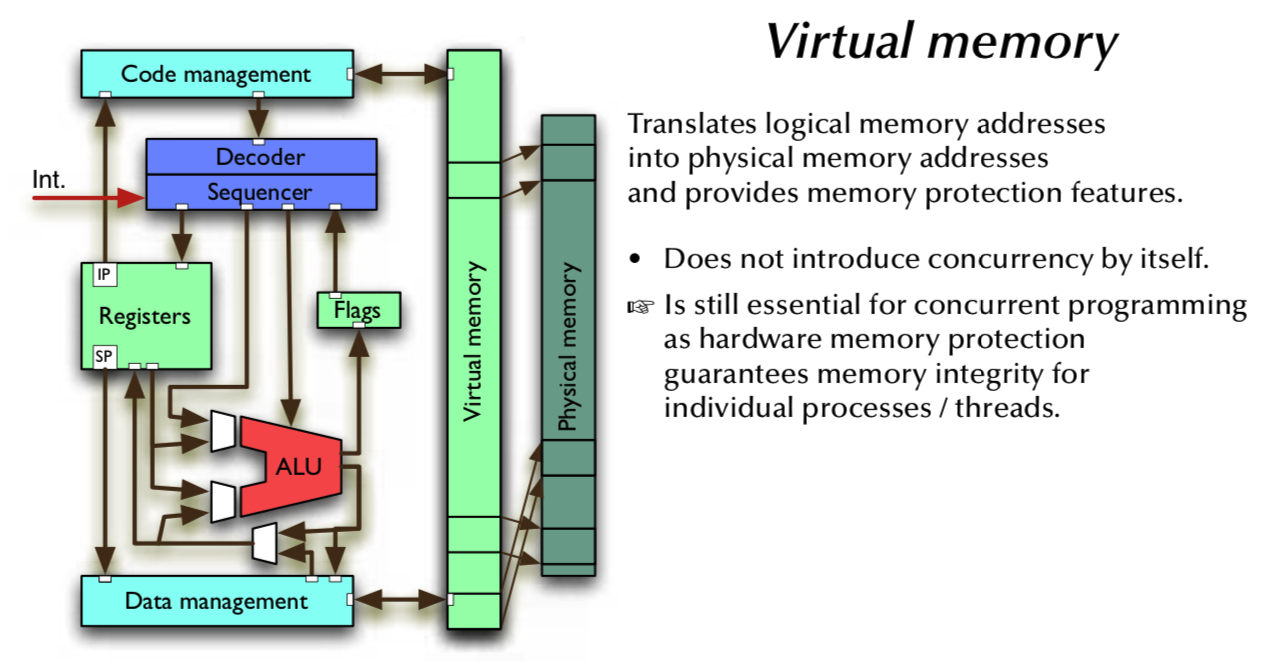
Is virtual memory an architecture (hardware) topic or an OS (software) topic?
Finally done. That was epic, thanks for coming with me everybody!