Twenty Three Hundred
Operating Systems
Dr Charles Martin
Semester 1, 2022

Admin Time
Little wires and alternatives—see details here
Week 10: Operating Systems
Outline
What is an OS?
talk
what is an operating system (OS)?
…it’s a virtual machine
offering a more familiar, comfortable and safer environment for your programs to run in
- memory management
- hardware abstraction
- process management
- inter-process communication (IPC)
…it’s a resource manager
co-ordinating access to hardware resources
- processors
- memory
- mass storage
- communication channels
- devices (timers, GPUs, DSPs, other peripherals…)
multiple tasks/processes/programs may be applying for access to these resources!
A brief history of operating systems…
1950s-60s: system monitors
IBM 704 mainframe at NACA in 1957
NASA / Public Domain
1960s - multi-programming system
University of Manchester Atlas, January 1963
Iain MacCallum / CC BY (https://creativecommons.org/licenses/by/3.0)
1970s - multi-tasking systems
DEC PDP-11
Stefan_Kögl / CC BY-SA (http://creativecommons.org/licenses/by-sa/3.0/)
1970s - early workstations...
Xerox Alto
Joho345 / Public domain
1970s-80s: Consumer OSs
Springsgrace / CC BY-SA (https://creativecommons.org/licenses/by-sa/4.0)
1990s+
NeXTStation
Blake Patterson / CC BY (https://creativecommons.org/licenses/by/2.0)
A brief history of operating systems (1)
in the beginning: single user, single program, single task, serial processing—no OS
- 50s: system monitors/batch processing
- the monitor ordered the sequence of jobs and triggered their sequential execution
- 50s-60s: advanced system monitors/batch processing:
- the monitor handles interrupts and timers
- first support for memory protection
- first implementations of privileged instructions (accessible by the monitor only)
- early 60s: multi-programming systems:
- use the long device I/O delays for switches to other runnable programs
- early 60s: multi-programming, time-sharing systems:
- assign time-slices to each program and switch regularly
A brief history of operating systems (2)
- early 70s: multi-tasking systems – multiple developments resulting in UNIX (and others)
- early 80s: single user, single tasking systems, with emphasis on user interface or APIs. MS-DOS, CP/M, MacOS and others first employed ‘small scale’ CPUs (personal computers).
- mid-80s: Distributed/multiprocessor operating systems - modern UNIX systems (SYSV, BSD)
- late 70s: Workstations starting by porting UNIX or VMS to ‘smaller’ computers.
- 80s: PCs starting with almost none of the classical OS-features and services, but with an user-interface (MacOS) and simple device drivers (MS-DOS)
A brief history of operating systems (3)
- last 20 years: evolving and expanding into current general purpose OSes, like for instance:
- Solaris (based on SVR4, BSD, and SunOS, and pretty much dead now)
- Linux (open source UNIX re-implementation for x86 processors and others)
- current Windows (used to be partly based on Windows NT, which is ‘related’ to VMS)
- MacOS (Mach kernel with BSD Unix and a proprietary user-interface)
- multi-processing is supported by all these OSes to some extent
- but not (really) suitable for embedded, or real-time systems
Standard features?
is there a standard set of features for operating systems?
no.
the term operating system covers everything from 4 kB microkernels, to > 1 GB installations of desktop general purpose operating systems
Minimal set of features?
is there a minimal set of features?
almost: memory management, process management and inter-process communication/synchronisation would be considered essential in most systems
is there always an explicit operating system?
no: some languages and development systems operate with standalone runtime environments
Process management
(we’ll talk more about this in a moment)
basically, this is the task of keeping multiple things going all at once…
…while tricking them all into thinking they’re the main game
talk
what’s a task?
Memory management
remember memory? the OS is responsible for sharing it around
- allocation / deallocation
- virtual memory: logical vs. physical addresses, segments, paging, swapping, etc.
- memory protection (privilege levels, separate virtual memory segments, …)
- shared memory (for performance, communication, …)
Synchronisation/inter-process communication
remember all the asynchronism stuff? the OS is responsible for managing that as well
semaphores, mutexes, condition variables, channels, mailboxes, MPI, etc.
this is tightly coupled to scheduling / task switching!
Hardware abstraction
remember all the specific load-twiddle-store addresses in the labs? no?
good news everyone! the OS does so you don’t have to
- device drivers
- protocols, file systems, networking, everything else…
all through a consistent API
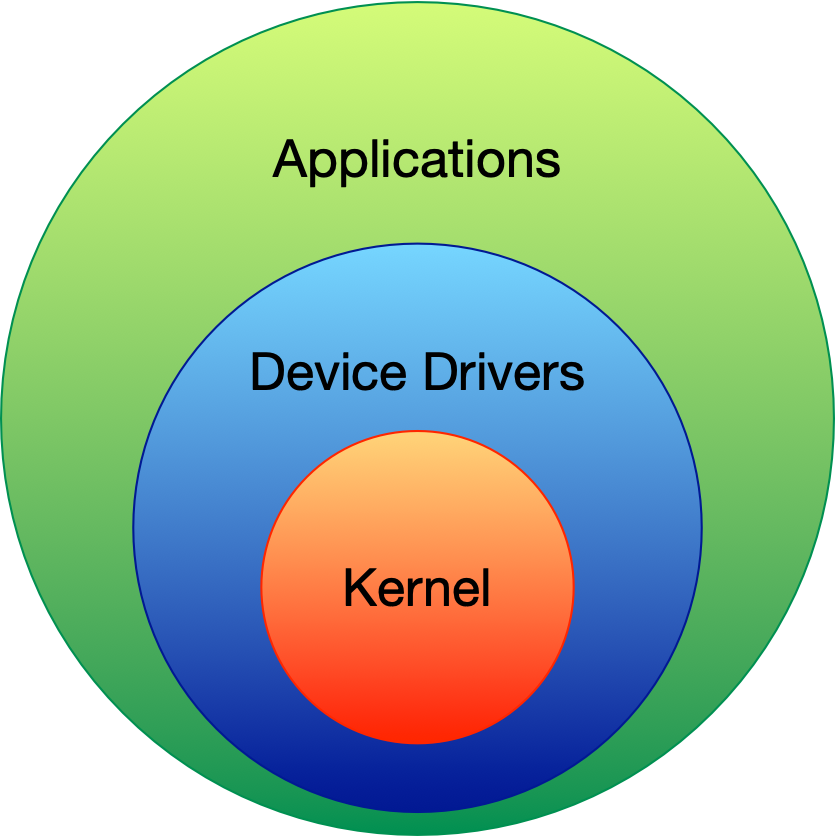
Kernel: definition
the kernel is the program (functions, data structures in memory, etc.) which performs the core role(s) of the OS
access to the CPU, memory, peripherals all happens through the kernel through a system call
info
if you want to look at some real system call APIs
on Linux,
on Windows,
writing an OS seems complicated
how is it done in practice?
Monolithic OS
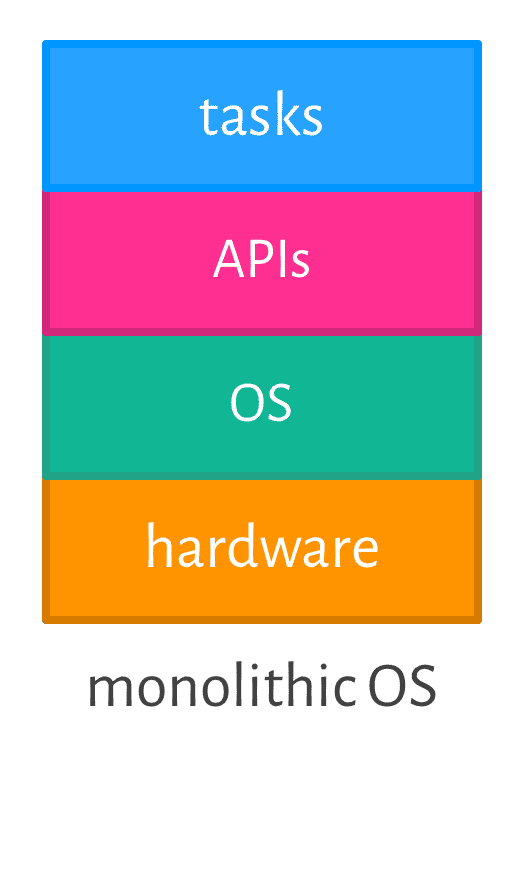
(or ‘the big mess…’)
- non-portable/hard to maintain
- lacks reliability
- all services are in the kernel (on the same privilege level)
- but: may reach high efficiency
e.g.: most early UNIX systems, MS-DOS (80s), Windows (all non-NT based versions) MacOS (until version 9), etc…
Monolithic & Modular OS
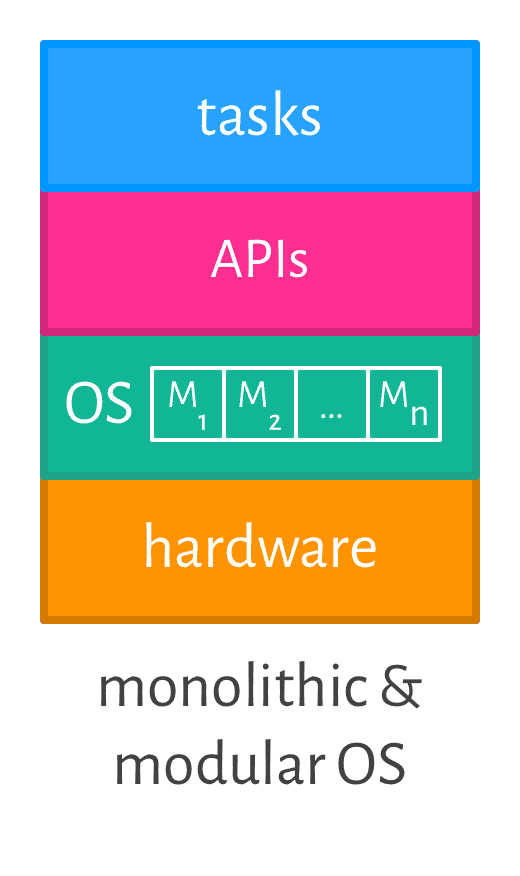
- modules can be platform independent
- easier to maintain and to develop
- reliability is increased
- all services are still in the kernel (on the same privilege level)
- may reach high efficiency
e.g., current Linux versions
μKernels & client-server models
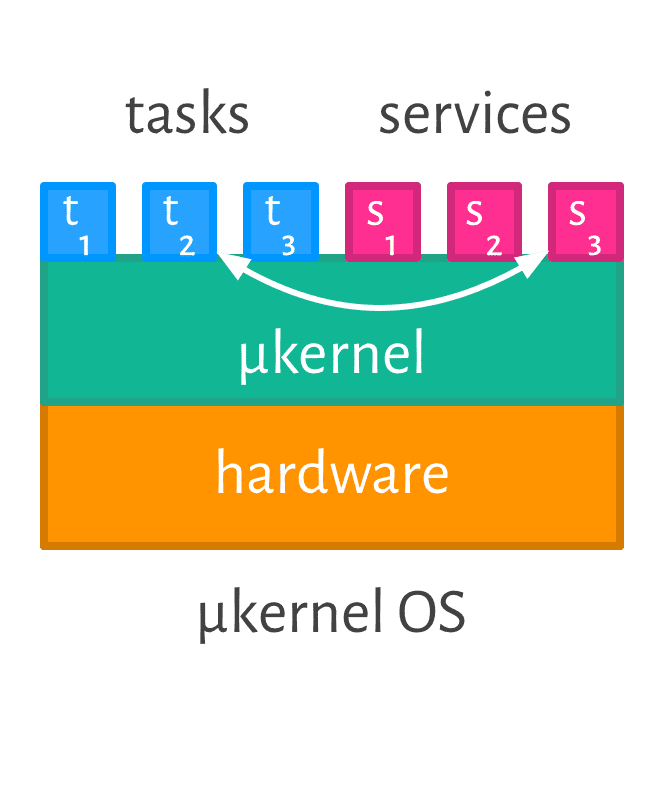
- μkernel implements essential process, memory, and message handling
- all ‘higher’ services are user level servers
- kernel ensures reliable message passing between clients and servers
- highly modular, flexible & maintainable
- servers can be redundant and easily replaced
- (possibly) reduced efficiency through increased communications
e.g., current research projects, μ, L4, Minix 3, etc.
Example: UNIX
- hierarchical file-system (maintained via
mountandunmount) - universal file-interface applied to files, devices (I/O), as well as IPC
- dynamic process creation via duplication
- choice of shells
- internal structure as well as all APIs are based on C
- relatively high degree of portability
many versions/flavours: UNICS, UNIX, BSD, XENIX, System V, QNX, IRIX, SunOS, Ultrix, Sinix, Mach, Plan 9, NeXTSTEP, AIX, HP-UX, Solaris, NetBSD, FreeBSD, Linux, OPENSTEP, OpenBSD, Darwin, QNX/Neutrino, OS X, QNX ROTS, …
Privilege levels
talk
what do you think privilege means?
how does it affect your code running on the microbit?
Privilege
Privilege levels
certain instructions can only be executed in “privileged” mode—this is enforced in hardware
different architectures enforce this in different ways
check the manual (e.g. Section A2.3.4 on p32 or Table B1-1 Mode on p568 of the ARMv7-M reference manual
ARMv7-M execution levels
| thread mode | handler mode | |
|---|---|---|
| privileged | regular code | all exceptions (including interrupts) |
| unprivileged | regular code | n/a |
priviliges may control:
- code execution
- memory read/write access
- register access (e.g., for peripherals)
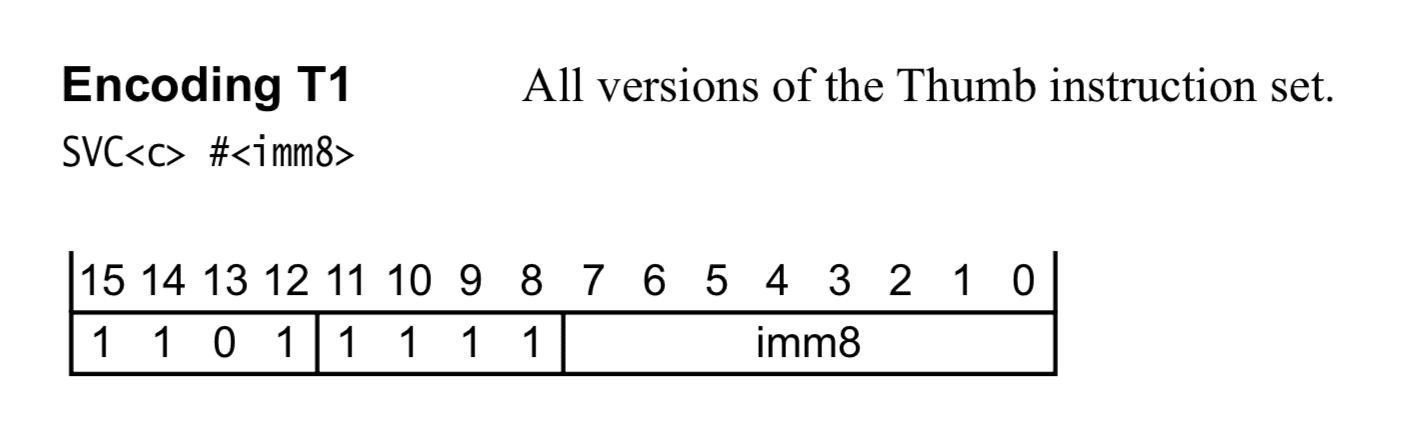
“Supervisor call” instruction
have you noticed these entries in the vector table in labs?
.word SVC_Handler
@ ...
.word PendSV_Handler
the svc instruction (A7.7.175 in the reference manual) runs the
SVC_Handler immediately
Deferred supervisor call (PendSV)
there’s a PENDSVSET bit (bit 28) in the Interrupt Control and State Register
(ICSR)
if set, the PendSV_Handler will be called according to the usual
interrupt/exception priority rules
both SVC_Handler and PendSV_Handler run in privileged mode, like all interrupts
System calls with svc
How might we implement a system call on a microbit?
How can we get at the argument? (Hint: see Figure B1-3 from the ARM-v7 M architecture reference)
How do system calls work in linux?
Types of Operating Systems
Distributed operating systems
- all CPUs carry a small kernel operating system for communication services
- all other OS services are distributed over available CPUs
- services may migrate
- services can be multiplied in order to guarantee availability (hot stand-by), or to increase throughput (heavy duty servers)
Real-time operating systems
- fast context switches? should be fast anyway
- small size? should be small anyway
- quick response to external interrupts? not quick, but predictable
- multitasking? often, not always
- 'low level' programming interfaces? needed in many operating systems
- interprocess communication tools? needed in almost all operating systems
- high processor utilisation? fault tolerance builds on redundancy
Real-time OS for music?
Real-time OS for robots?
Real-time OS for cars?
Real-time operating systems need to provide…
the logical correctness of the results as well as the correctness of the time: what and when are both important
all results are to be delivered just-in-time—not too early, not too late.
timing constraints are specified in many different ways… often as a response to external events (reactive systems)
predictability, not performance!
Embedded Operating Systems
usually real-time systems, often hard real-time systems
very small footprint (often a few kBytes)
none or limited user-interaction
most processors in the world are in embedded systems
Processes & scheduling
Trust the Process
talk
(if you’ve got your laptop here) how many processes are running on your machine right now?
how about on your phone?
Process: definition
basically: a running program
includes the code (instructions) for the program, and the current state/context:
- registers/flags
- memory (stack and heap)
- permissions/privileges
- other resources (e.g. global variables, open files & network connections, address space mappings)
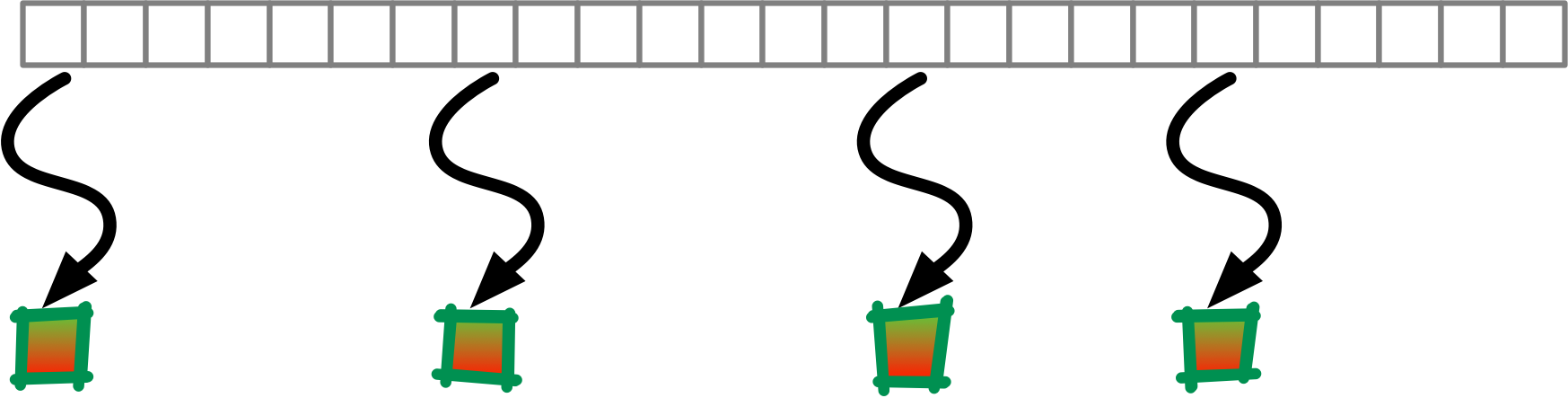
processes as far as the eye can see
exact definition of process
depends on the OS
so how do we manage them?
1 CPU per control-flow
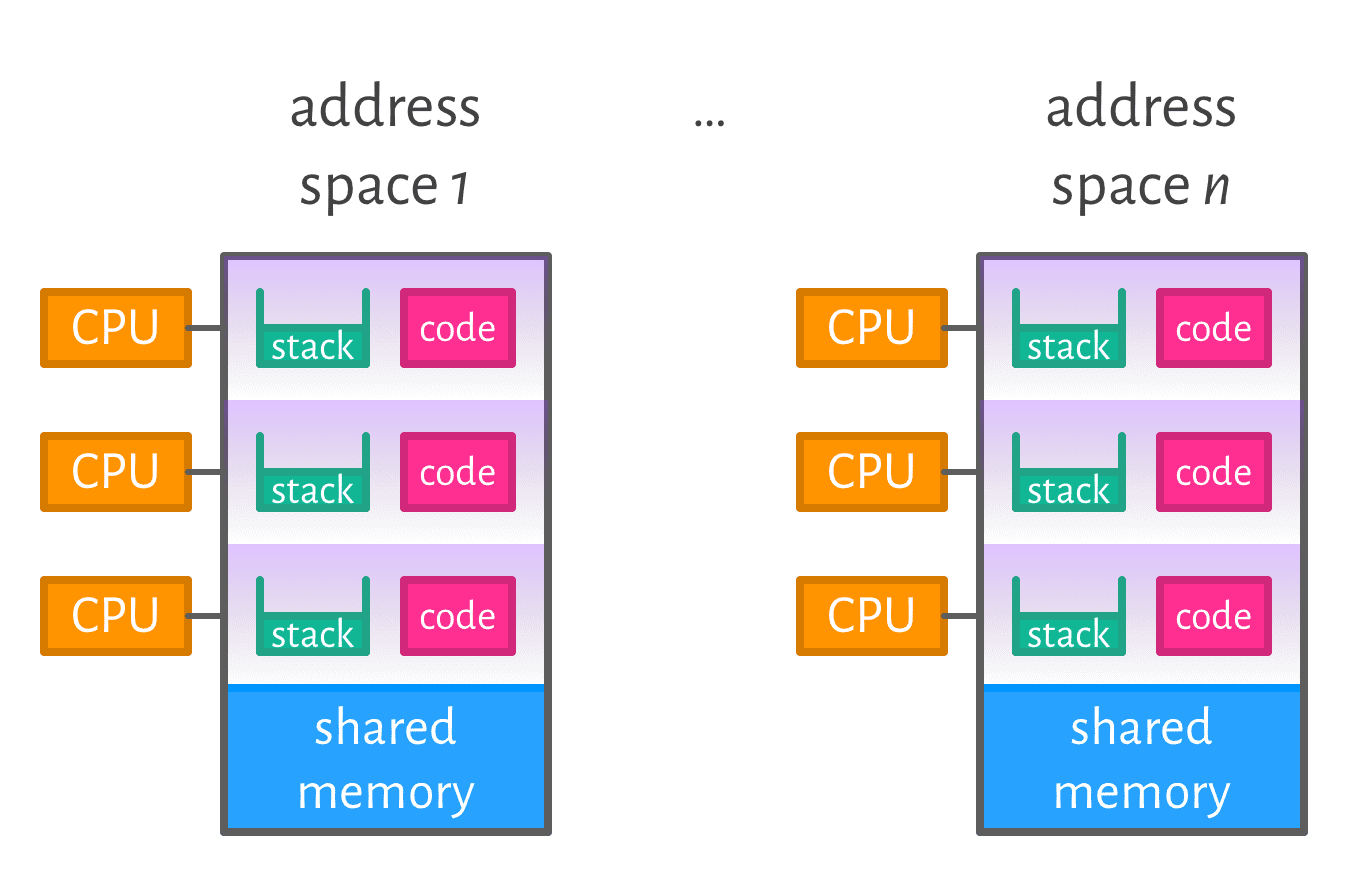
specific configurations only, e.g.:
- distributed microcontrollers
- physical process control systems
1 cpu per task, connected via a bus system
- Process management (scheduling) not required
- Shared memory access need to be coordinated
1 CPU for all control-flows
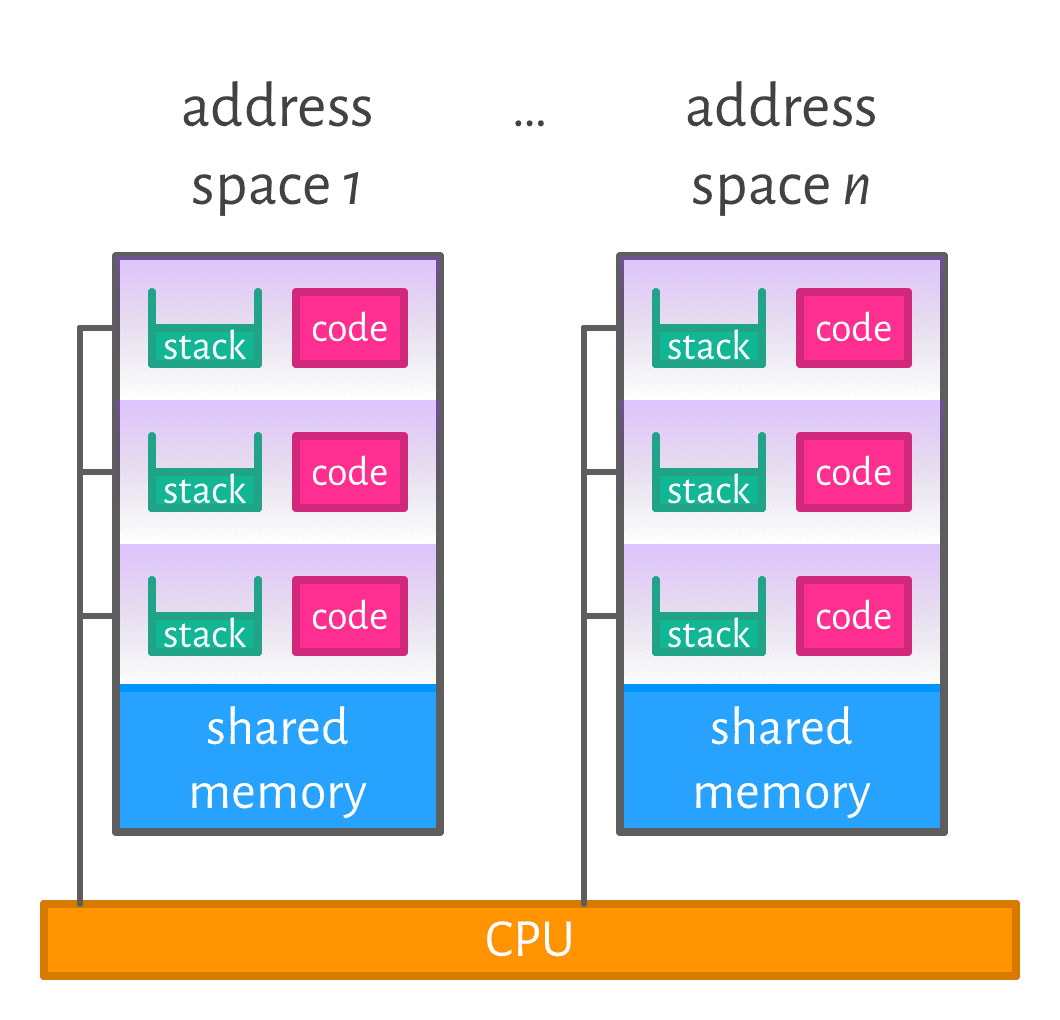
the OS may “emulate” one CPU for every control-flow
this is a multi-tasking operating system
- support for memory protection essential
- process management (scheduling) required
- shared memory access need to be coordinated
Symmetric multiprocessing (SMP)
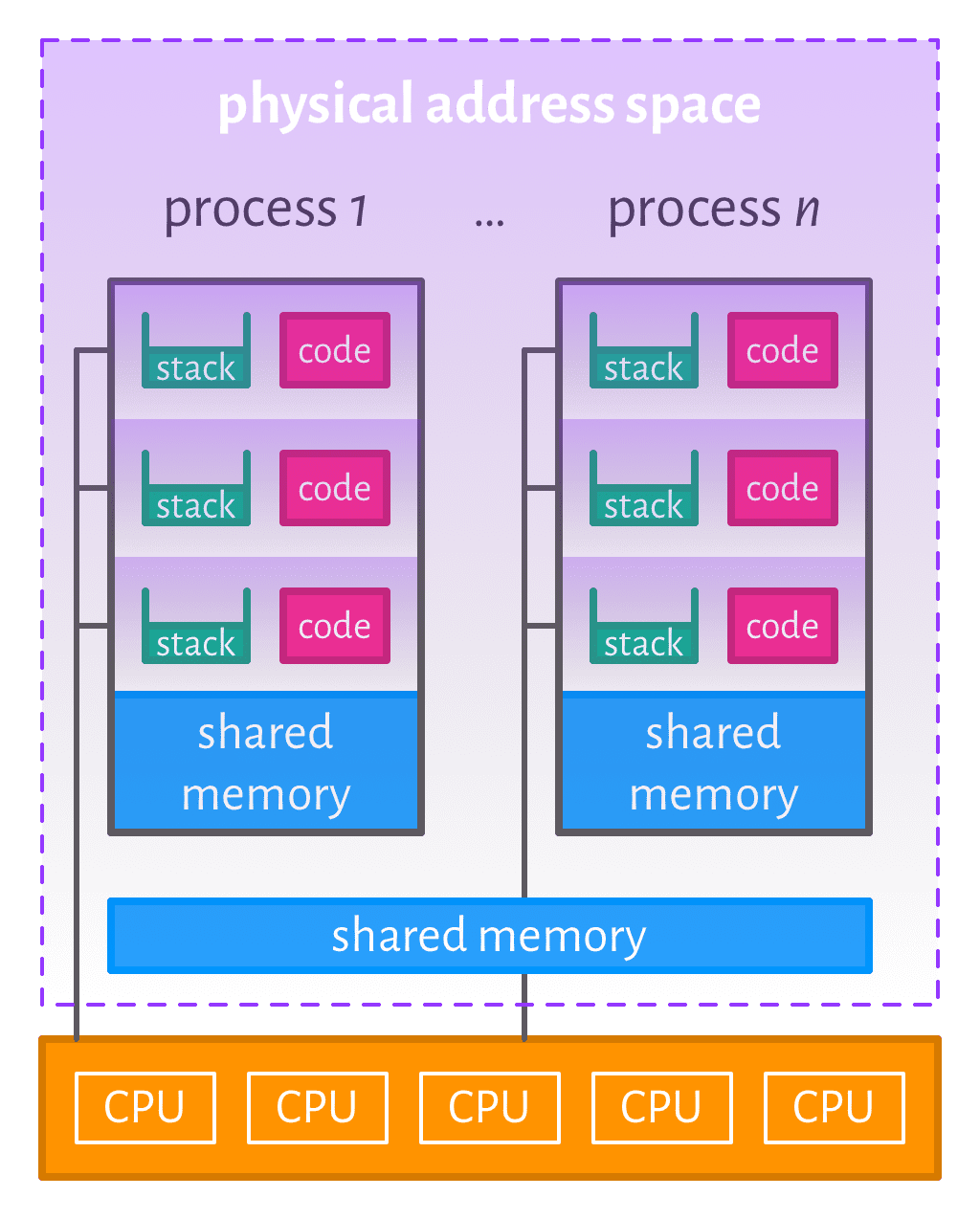
all CPUs share the same physical address space (and have access to the same resources) so any process can be executed on any available CPU
Processes vs threads
processes (as discussed earlier) have their own registers, stack, resources, etc.
threads have their own registers & stack, but share the other process resources
one process can create/manage many threads
Torvalds vs Threads
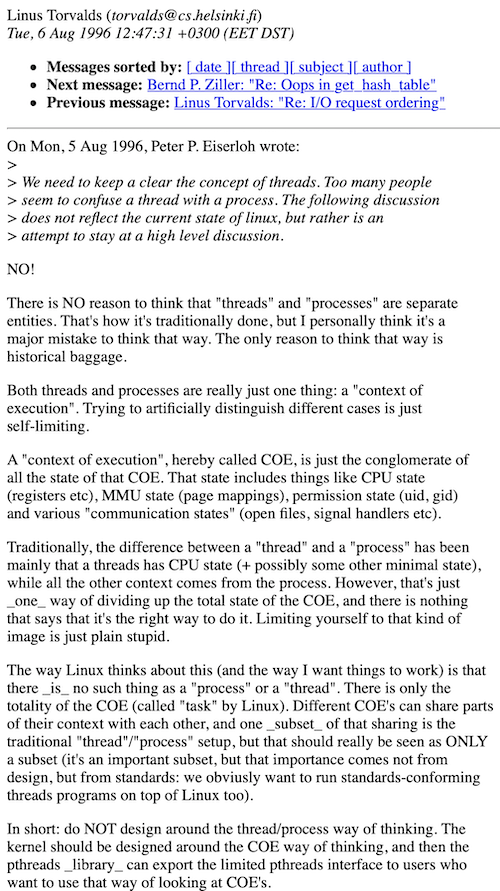
"Depends on the implementation"...
Process Control Blocks (PCBs)
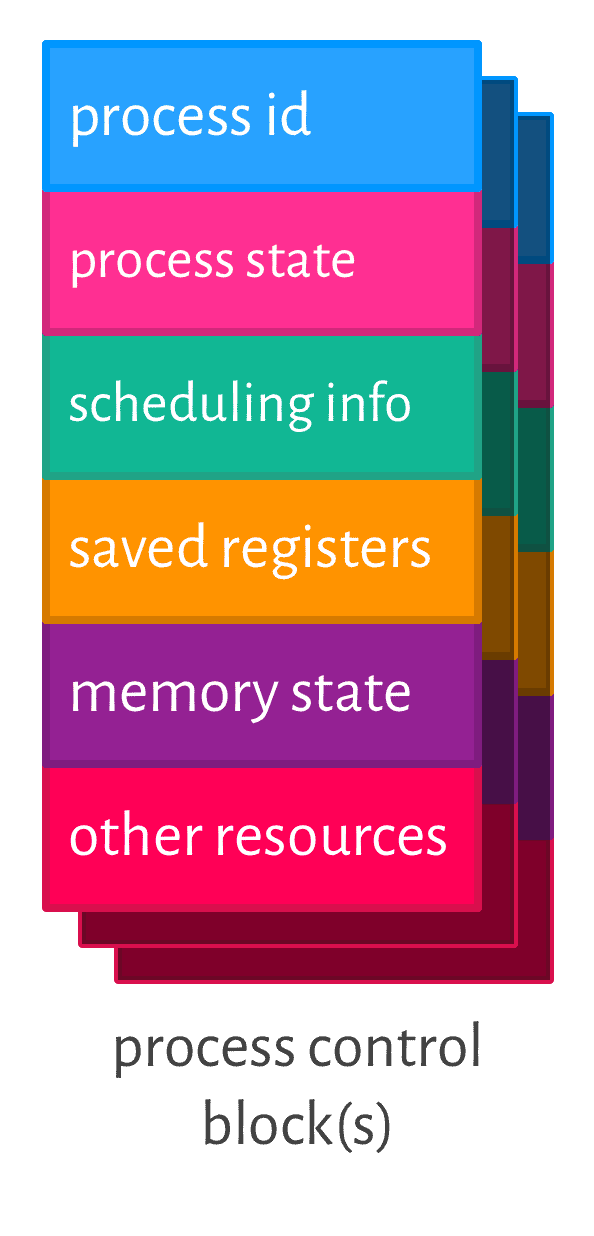
- process ID
- process state: {created, ready, executing, blocked, suspended, bored …}
- scheduling attributes: priorities, deadlines
- CPU state: (e.g. registers, stack pointer)
- memory attributes/privileges: permissions, limits, shared areas
- allocated resources: open/requested devices and files, etc.
a data structure for processes
Process states
- created: the task is ready to run, but not yet considered by any dispatcher
- ready: ready to run (waiting for a free CPU)
- running: holds a CPU and executes
- blocked: not ready to run (waiting for a resource)
- suspended: swapped out of main memory (e.g. waiting for main memory space)
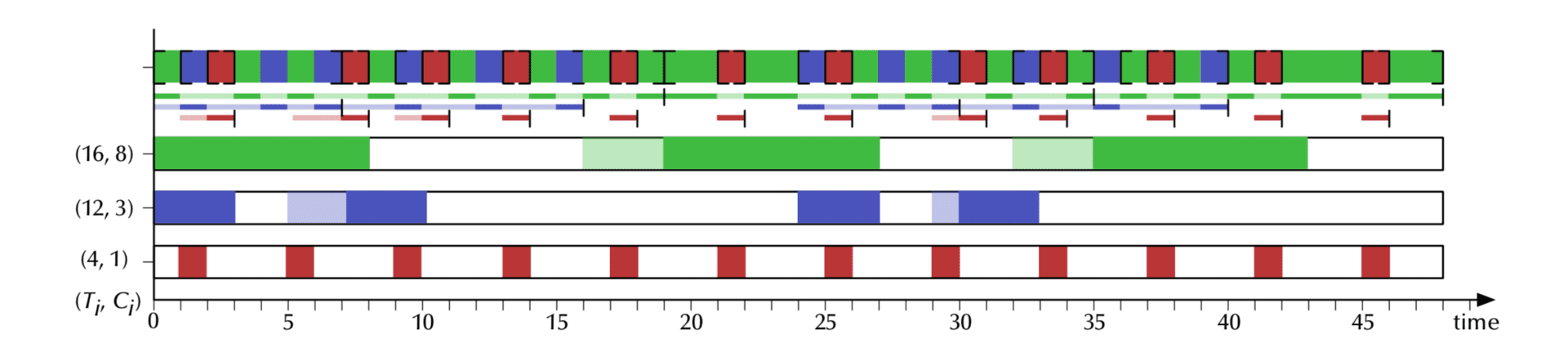
First come, first served (FCFS) scheduling
- Waiting time: 0..11, average: 5.9
- Turnaround time: 3..12, average: 8.4
even a deterministic scheduling schema like FCFS can lead to different outcomes
FCFS (again)
- Waiting time: 0..11, average: 5.4 (was 5.9 before)
- Turnaround time: 3..12, average: 8.0 (was 8.4 before)
FCFS gives the shortest possible maximal turnaround time
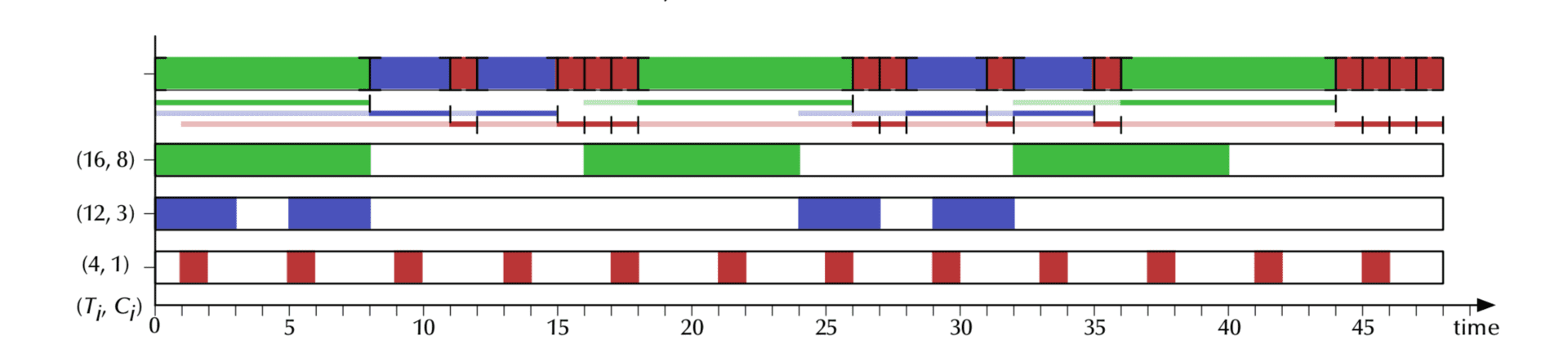
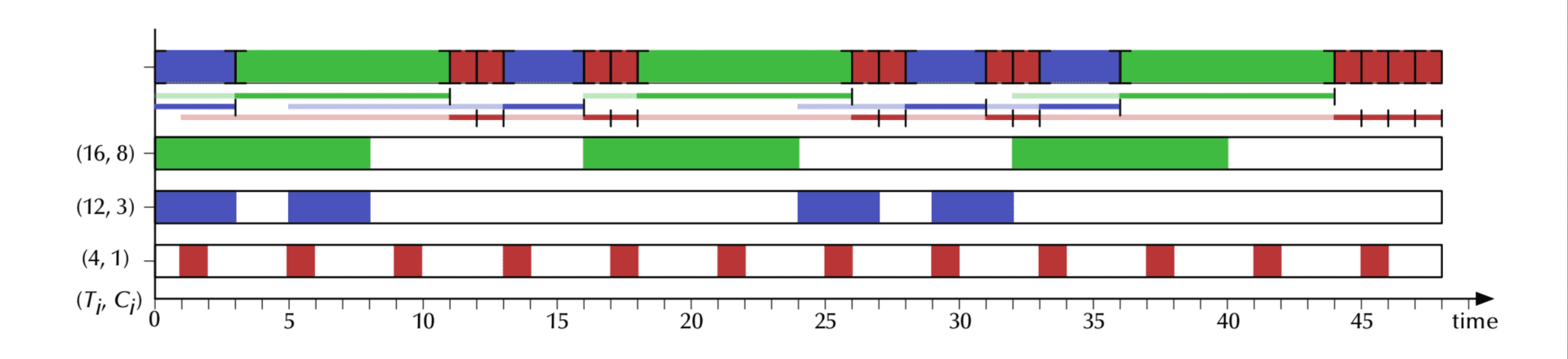
Round-robin (RR) scheduling
- Waiting time: 0..5, average: 1.2
- Turnaround time: 1..20, average: 5.8
optimised for swift initial responses, but “stretches out” long tasks
bound maximal waiting time! (depended only on the number of tasks)
talk
when might you want to use FCFS scheduling? how about RR?
Again, a whirlwind tour of OSes
remember the concepts
go build your own in labs.
Questions
Fun With Operating Systems
Further Reading
Essentials of Computer Organisation and Architecture - Chapter 8.2: Operating Systems